 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePGDG: Physically Grounded Data Generation for Robust Bimanual Policy Learning from a Single Demonstration
May 20, 2026Behavior cloning for contact-rich bimanual manipulation remains challenging because diverse demonstrations are expensive to collect, and even small disturbances can push the system into off-manifold states where no recovery supervision is available. We propose PGDG, a data generation framework with zero-shot curation that expands a single demonstration into a compact dataset of physically plausible, successful, and diverse recovery behaviors without additional human labeling. PGDG iterates between a physics-grounded sampler and a dataset curator, where the curator selects informative, non-redundant, and recoverable behaviors to update the sampling distribution toward under-covered recovery modes, and the sampler draws physically plausible rollout candidates from this updated distribution and retains successful trajectories. To further improve data quality, PGDG applies short-horizon sampling-based control to relabel selected risky states with corrective actions. Across four bimanual manipulation tasks, PGDG consistently outperforms spatial-only augmentation in both simulation and zero-shot real-world transfer. On RotateBox-Pitch, success improves from 38% to 93% in simulation and from 35% to 82% in the real world. PGDG also enables effective foundation models fine-tuning such as GR00T, increasing success from 46% to 77%. Additional results are available in our website: https://cunxid.github.io/PGDG/.
NavMoE: Hybrid Model- and Learning-based Traversability Estimation for Local Navigation via Mixture of Experts
Sep 16, 2025This paper explores traversability estimation for robot navigation. A key bottleneck in traversability estimation lies in efficiently achieving reliable and robust predictions while accurately encoding both geometric and semantic information across diverse environments. We introduce Navigation via Mixture of Experts (NAVMOE), a hierarchical and modular approach for traversability estimation and local navigation. NAVMOE combines multiple specialized models for specific terrain types, each of which can be either a classical model-based or a learning-based approach that predicts traversability for specific terrain types. NAVMOE dynamically weights the contributions of different models based on the input environment through a gating network. Overall, our approach offers three advantages: First, NAVMOE enables traversability estimation to adaptively leverage specialized approaches for different terrains, which enhances generalization across diverse and unseen environments. Second, our approach significantly improves efficiency with negligible cost of solution quality by introducing a training-free lazy gating mechanism, which is designed to minimize the number of activated experts during inference. Third, our approach uses a two-stage training strategy that enables the training for the gating networks within the hybrid MoE method that contains nondifferentiable modules. Extensive experiments show that NAVMOE delivers a better efficiency and performance balance than any individual expert or full ensemble across different domains, improving cross- domain generalization and reducing average computational cost by 81.2% via lazy gating, with less than a 2% loss in path quality.
Search-Based Path Planning among Movable Obstacles
Oct 24, 2024



This paper investigates Path planning Among Movable Obstacles (PAMO), which seeks a minimum cost collision-free path among static obstacles from start to goal while allowing the robot to push away movable obstacles (i.e., objects) along its path when needed. To develop planners that are complete and optimal for PAMO, the planner has to search a giant state space involving both the location of the robot as well as the locations of the objects, which grows exponentially with respect to the number of objects. The main idea in this paper is that, only a small fraction of this giant state space needs to be explored during planning as guided by a heuristic, and most of the objects far away from the robot are intact, which thus leads to runtime efficient algorithms. Based on this idea, this paper introduces two PAMO formulations, i.e., bi-objective and resource constrained problems in an occupancy grid, and develops PAMO*, a search method with completeness and solution optimality guarantees, to solve the two problems. We then further extend PAMO* to hybrid-state PAMO* to plan in continuous spaces with high-fidelity interaction between the robot and the objects. Our results show that, PAMO* can often find optimal solutions within a second in cluttered environments with up to 400 objects.
Air-FAR: Fast and Adaptable Routing for Aerial Navigation in Large-scale Complex Unknown Environments
Sep 17, 2024



This paper presents a novel method for real-time 3D navigation in large-scale, complex environments using a hierarchical 3D visibility graph (V-graph). The proposed algorithm addresses the computational challenges of V-graph construction and shortest path search on the graph simultaneously. By introducing hierarchical 3D V-graph construction with heuristic visibility update, the 3D V-graph is constructed in O(K*n^2logn) time, which guarantees real-time performance. The proposed iterative divide-and-conquer path search method can achieve near-optimal path solutions within the constraints of real-time operations. The algorithm ensures efficient 3D V-graph construction and path search. Extensive simulated and real-world environments validated that our algorithm reduces the travel time by 42%, achieves up to 24.8% higher trajectory efficiency, and runs faster than most benchmarks by orders of magnitude in complex environments. The code and developed simulator have been open-sourced to facilitate future research.
Interactive-FAR:Interactive, Fast and Adaptable Routing for Navigation Among Movable Obstacles in Complex Unknown Environments
Apr 11, 2024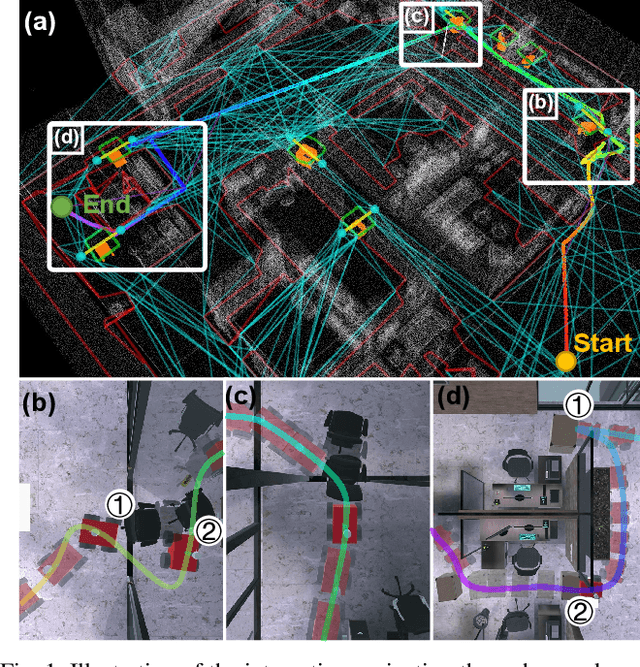
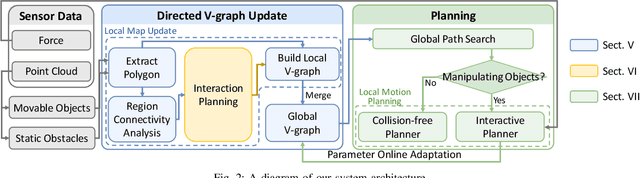
This paper introduces a real-time algorithm for navigating complex unknown environments cluttered with movable obstacles. Our algorithm achieves fast, adaptable routing by actively attempting to manipulate obstacles during path planning and adjusting the global plan from sensor feedback. The main contributions include an improved dynamic Directed Visibility Graph (DV-graph) for rapid global path searching, a real-time interaction planning method that adapts online from new sensory perceptions, and a comprehensive framework designed for interactive navigation in complex unknown or partially known environments. Our algorithm is capable of replanning the global path in several milliseconds. It can also attempt to move obstacles, update their affordances, and adapt strategies accordingly. Extensive experiments validate that our algorithm reduces the travel time by 33%, achieves up to 49% higher path efficiency, and runs faster than traditional methods by orders of magnitude in complex environments. It has been demonstrated to be the most efficient solution in terms of speed and efficiency for interactive navigation in environments of such complexity. We also open-source our code in the docker demo to facilitate future research.