 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUni-PrevPredMap: Extending PrevPredMap to a Unified Framework of Prior-Informed Modeling for Online Vectorized HD Map Construction
Apr 10, 2025Safety constitutes a foundational imperative for autonomous driving systems, necessitating the maximal incorporation of accessible external prior information. This study establishes that temporal perception buffers and cost-efficient maps inherently form complementary prior sources for online vectorized high-definition (HD) map construction. We present Uni-PrevPredMap, a unified prior-informed framework that systematically integrates two synergistic information sources: previous predictions and simulated outdated HD maps. The framework introduces two core innovations: a tile-indexed 3D vectorized global map processor enabling efficient refreshment, storage, and retrieval of 3D vectorized priors; a tri-mode operational optimization paradigm ensuring consistency across non-prior, temporal-prior, and temporal-map-fusion-prior scenarios while mitigating reliance on idealized map fidelity assumptions. Uni-PrevPredMap achieves state-of-the-art performance in map-absent scenarios across established online vectorized HD map construction benchmarks. When provided with simulated outdated HD maps, the framework exhibits robust capabilities in error-resilient prior fusion, empirically confirming the synergistic complementarity between previous predictions and simulated outdated HD maps. Code will be available at https://github.com/pnnnnnnn/Uni-PrevPredMap.
PrevPredMap: Exploring Temporal Modeling with Previous Predictions for Online Vectorized HD Map Construction
Jul 24, 2024
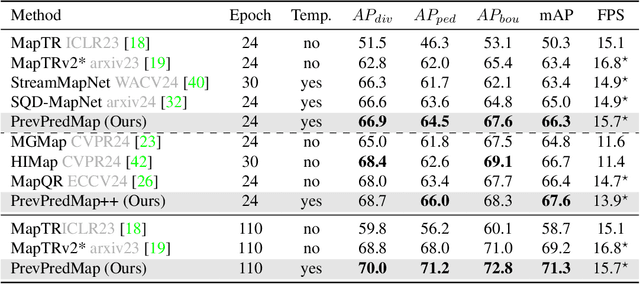


Temporal information is crucial for detecting occluded instances. Existing temporal representations have progressed from BEV or PV features to more compact query features. Compared to these aforementioned features, predictions offer the highest level of abstraction, providing explicit information. In the context of online vectorized HD map construction, this unique characteristic of predictions is potentially advantageous for long-term temporal modeling and the integration of map priors. This paper introduces PrevPredMap, a pioneering temporal modeling framework that leverages previous predictions for constructing online vectorized HD maps. We have meticulously crafted two essential modules for PrevPredMap: the previous-predictions-based query generator and the dynamic-position-query decoder. Specifically, the previous-predictions-based query generator is designed to separately encode different types of information from previous predictions, which are then effectively utilized by the dynamic-position-query decoder to generate current predictions. Furthermore, we have developed a dual-mode strategy to ensure PrevPredMap's robust performance across both single-frame and temporal modes. Extensive experiments demonstrate that PrevPredMap achieves state-of-the-art performance on the nuScenes and Argoverse2 datasets. Code will be available at https://github.com/pnnnnnnn/PrevPredMap.