 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Data-Centric Behavioral Machine Learning Platform to Reduce Health Inequalities
Nov 17, 2021
Providing front-line health workers in low- and middle- income countries with recommendations and predictions to improve health outcomes can have a tremendous impact on reducing healthcare inequalities, for instance by helping to prevent the thousands of maternal and newborn deaths that occur every day. To that end, we are developing a data-centric machine learning platform that leverages the behavioral logs from a wide range of mobile health applications running in those countries. Here we describe the platform architecture, focusing on the details that help us to maximize the quality and organization of the data throughout the whole process, from the data ingestion with a data-science purposed software development kit to the data pipelines, feature engineering and model management.
Learning General Policies from Small Examples Without Supervision
Jan 03, 2021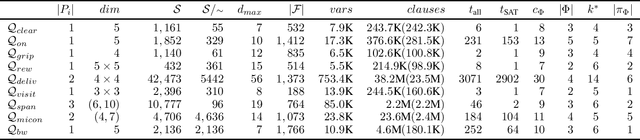
Generalized planning is concerned with the computation of general policies that solve multiple instances of a planning domain all at once. It has been recently shown that these policies can be computed in two steps: first, a suitable abstraction in the form of a qualitative numerical planning problem (QNP) is learned from sample plans, then the general policies are obtained from the learned QNP using a planner. In this work, we introduce an alternative approach for computing more expressive general policies which does not require sample plans or a QNP planner. The new formulation is very simple and can be cast in terms that are more standard in machine learning: a large but finite pool of features is defined from the predicates in the planning examples using a general grammar, and a small subset of features is sought for separating "good" from "bad" state transitions, and goals from non-goals. The problems of finding such a "separating surface" while labeling the transitions as "good" or "bad" are jointly addressed as a single combinatorial optimization problem expressed as a Weighted Max-SAT problem. The advantage of looking for the simplest policy in the given feature space that solves the given examples, possibly non-optimally, is that many domains have no general, compact policies that are optimal. The approach yields general policies for a number of benchmark domains.
Learning Features and Abstract Actions for Computing Generalized Plans
Nov 17, 2018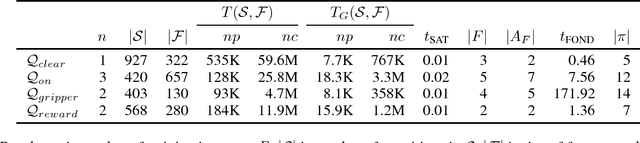
Generalized planning is concerned with the computation of plans that solve not one but multiple instances of a planning domain. Recently, it has been shown that generalized plans can be expressed as mappings of feature values into actions, and that they can often be computed with fully observable non-deterministic (FOND) planners. The actions in such plans, however, are not the actions in the instances themselves, which are not necessarily common to other instances, but abstract actions that are defined on a set of common features. The formulation assumes that the features and the abstract actions are given. In this work, we address this limitation by showing how to learn them automatically. The resulting account of generalized planning combines learning and planning in a novel way: a learner, based on a Max SAT formulation, yields the features and abstract actions from sampled state transitions, and a FOND planner uses this information, suitably transformed, to produce the general plans. Correctness guarantees are given and experimental results on several domains are reported.
Combined Task and Motion Planning as Classical AI Planning
Jun 21, 2017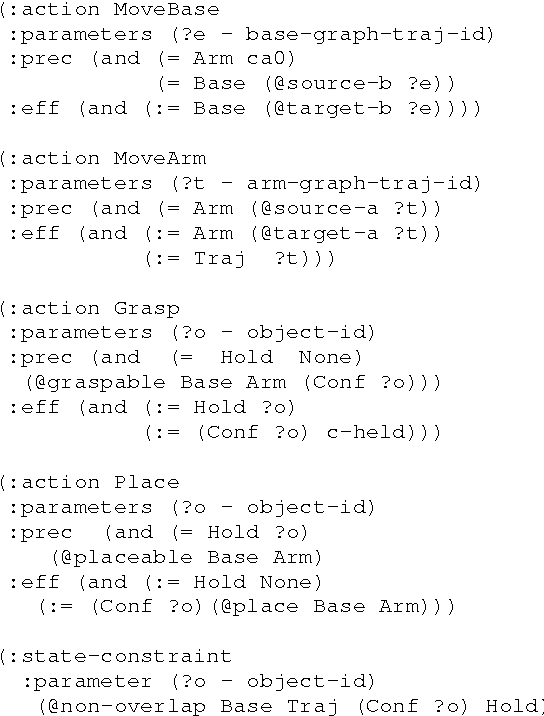
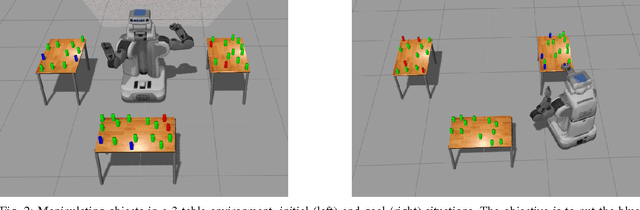

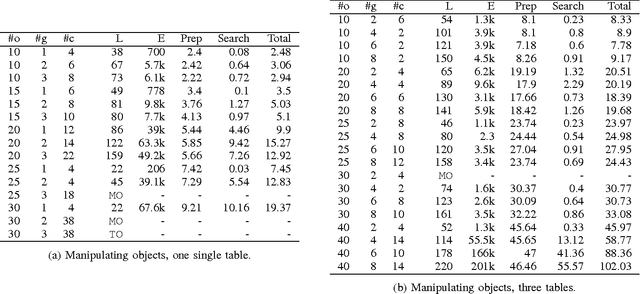
Planning in robotics is often split into task and motion planning. The high-level, symbolic task planner decides what needs to be done, while the motion planner checks feasibility and fills up geometric detail. It is known however that such a decomposition is not effective in general as the symbolic and geometrical components are not independent. In this work, we show that it is possible to compile task and motion planning problems into classical AI planning problems; i.e., planning problems over finite and discrete state spaces with a known initial state, deterministic actions, and goal states to be reached. The compilation is sound, meaning that classical plans are valid robot plans, and probabilistically complete, meaning that valid robot plans are classical plans when a sufficient number of configurations is sampled. In this approach, motion planners and collision checkers are used for the compilation, but not at planning time. The key elements that make the approach effective are 1) expressive classical AI planning languages for representing the compiled problems in compact form, that unlike PDDL make use of functions and state constraints, and 2) general width-based search algorithms capable of finding plans over huge combinatorial spaces using weak heuristics only. Empirical results are presented for a PR2 robot manipulating tens of objects, for which long plans are required.