 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Cloth Manipulation with Deep Reinforcement Learning
Oct 31, 2019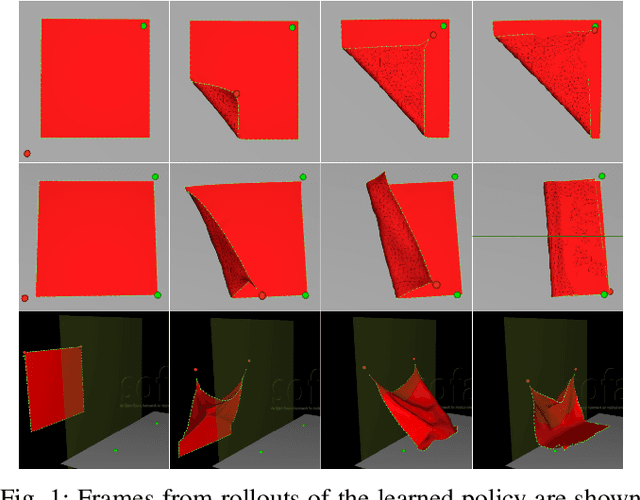

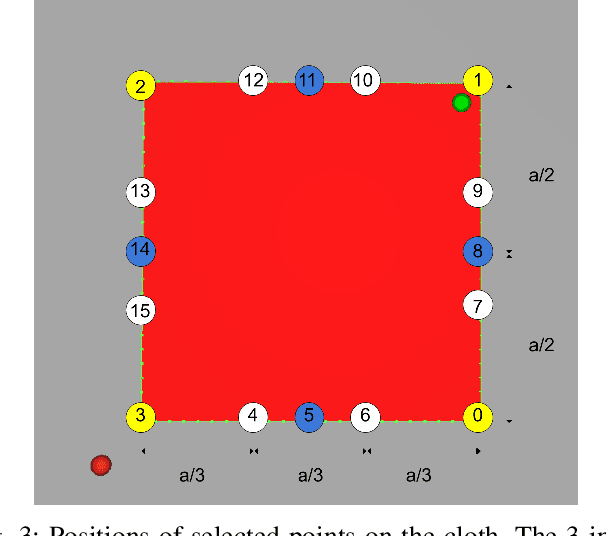
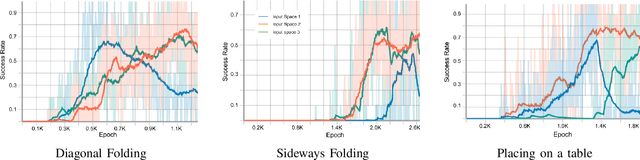
In this paper we present a Deep Reinforcement Learning approach to solve dynamic cloth manipulation tasks. Differing from the case of rigid objects, we stress that the followed trajectory (including speed and acceleration) has a decisive influence on the final state of cloth, which can greatly vary even if the positions reached by the grasped points are the same. We explore how goal positions for non-grasped points can be attained through learning adequate trajectories for the grasped points. Our approach uses few demonstrations to improve control policy learning, and a sparse reward approach to avoid engineering complex reward functions. Since perception of textiles is challenging, we also study different state representations to assess the minimum observation space required for learning to succeed. Finally, we compare different combinations of control policy encodings, demonstrations, and sparse reward learning techniques, and show that our proposed approach can learn dynamic cloth manipulation in an efficient way, i.e., using a reduced observation space, a few demonstrations, and a sparse reward.
A Grasping-centered Analysis for Cloth Manipulation
Jun 19, 2019


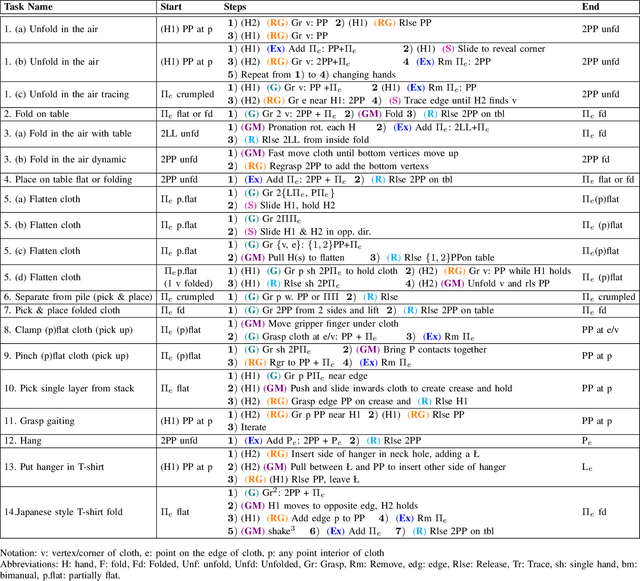
Compliant and soft hands have gained a lot of attention in the past decade because of their ability to adapt to the shape of the objects, increasing their effectiveness for grasping. However, when it comes to grasping highly flexible objects such as textiles, we face the dual problem: it is the object that will adapt to the shape of the hand or gripper. In this context, the classic grasp analysis or grasping taxonomies are not suitable for describing textile objects grasps. This work proposes a novel definition of textile object grasps that abstracts from the robotic embodiment or hand shape and recovers concepts from the early neuroscience literature on hand prehension skills. This framework enables us to identify what grasps have been used in literature until now to perform robotic cloth manipulation, and allows for a precise definition of all the tasks that have been tackled in terms of manipulation primitives based on regrasps. In addition, we also review what grippers have been used. Our analysis shows how the vast majority of cloth manipulations have relied only on one type of grasp, and at the same time we identify several tasks that need more variety of grasp types to be executed successfully. Our framework is generic, provides a classification of cloth manipulation primitives and can inspire gripper design and benchmark construction for cloth manipulation.