 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCertification of embedded systems based on Machine Learning: A survey
Jun 14, 2021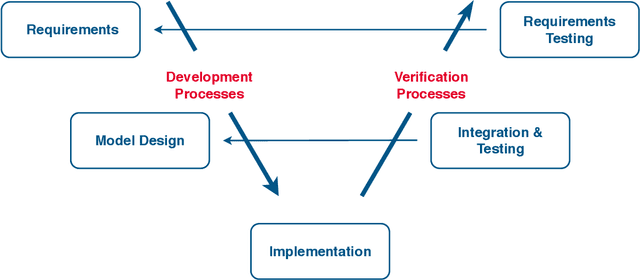
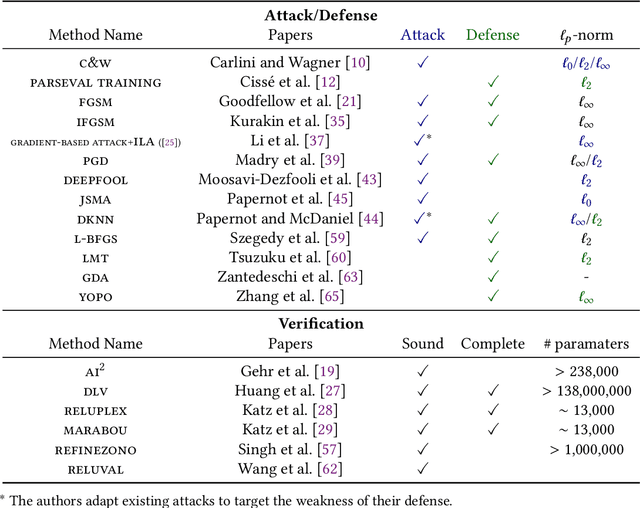
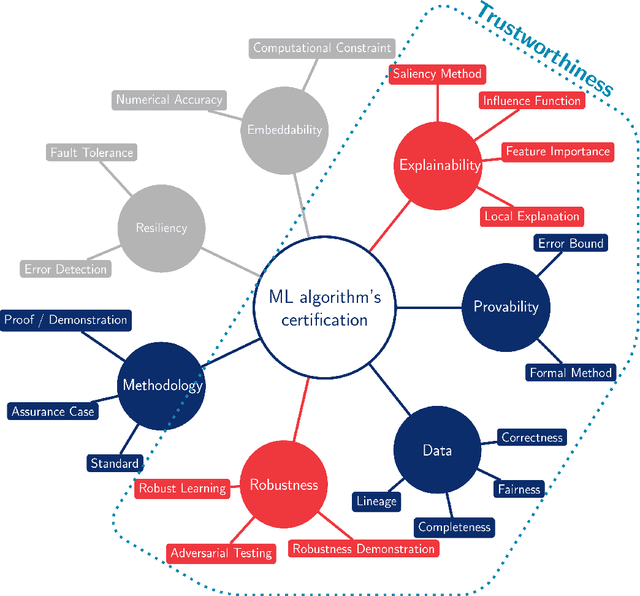
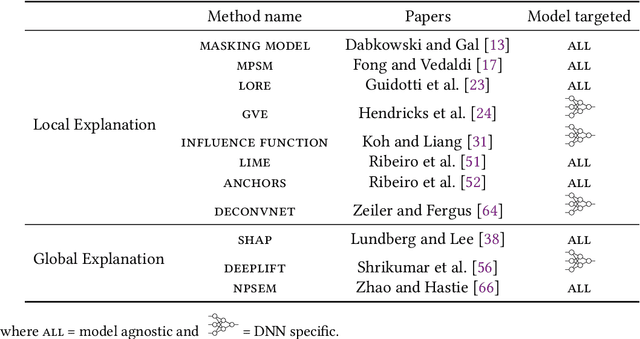
Advances in machine learning (ML) open the way to innovating functions in the avionic domain, such as navigation/surveillance assistance (e.g. vision-based navigation, obstacle sensing, virtual sensing), speechto-text applications, autonomous flight, predictive maintenance or cockpit assistance. Current certification standards and practices, which were defined and refined decades over decades with classical programming in mind, do not however support this new development paradigm. This article provides an overview of the main challenges raised by the use ML in the demonstration of compliance with regulation requirements, and a survey of literature relevant to these challenges, with particular focus on the issues of robustness and explainability of ML results.
A PAC-Bayes Analysis of Adversarial Robustness
Feb 19, 2021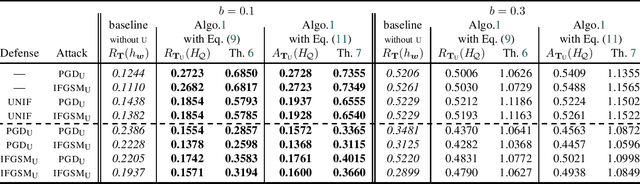
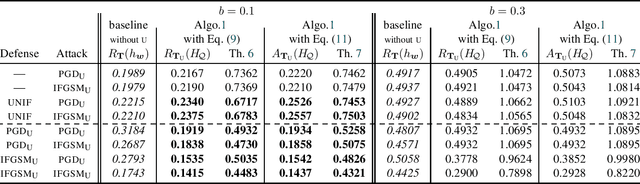
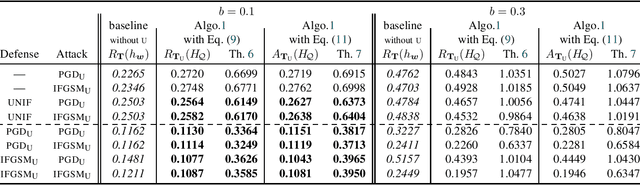
We propose the first general PAC-Bayesian generalization bounds for adversarial robustness, that estimate, at test time, how much a model will be invariant to imperceptible perturbations in the input. Instead of deriving a worst-case analysis of the risk of a hypothesis over all the possible perturbations, we leverage the PAC-Bayesian framework to bound the averaged risk on the perturbations for majority votes (over the whole class of hypotheses). Our theoretically founded analysis has the advantage to provide general bounds (i) independent from the type of perturbations (i.e., the adversarial attacks), (ii) that are tight thanks to the PAC-Bayesian framework, (iii) that can be directly minimized during the learning phase to obtain a robust model on different attacks at test time.