 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForming a sparse representation for visual place recognition using a neurorobotic approach
Sep 30, 2021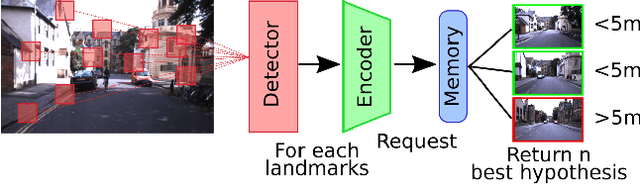

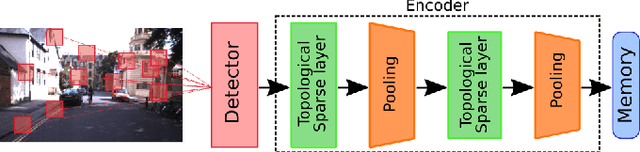
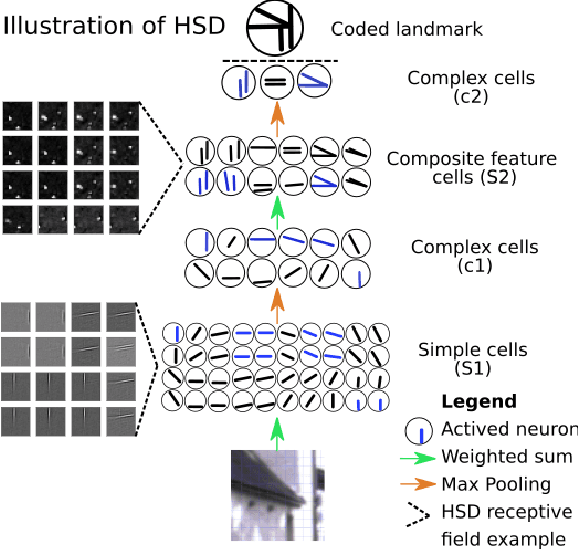
This paper introduces a novel unsupervised neural network model for visual information encoding which aims to address the problem of large-scale visual localization. Inspired by the structure of the visual cortex, the model (namely HSD) alternates layers of topologic sparse coding and pooling to build a more compact code of visual information. Intended for visual place recognition (VPR) systems that use local descriptors, the impact of its integration in a bio-inpired model for self-localization (LPMP) is evaluated. Our experimental results on the KITTI dataset show that HSD improves the runtime speed of LPMP by a factor of at least 2 and its localization accuracy by 10%. A comparison with CoHog, a state-of-the-art VPR approach, showed that our method achieves slightly better results.
Monocular Urban Localization using Street View
Jun 16, 2016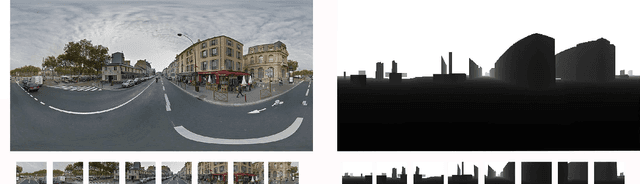


This paper presents a metric global localization in the urban environment only with a monocular camera and the Google Street View database. We fully leverage the abundant sources from the Street View and benefits from its topo-metric structure to build a coarse-to-fine positioning, namely a topological place recognition process and then a metric pose estimation by local bundle adjustment. Our method is tested on a 3 km urban environment and demonstrates both sub-meter accuracy and robustness to viewpoint changes, illumination and occlusion. To our knowledge, this is the first work that studies the global urban localization simply with a single camera and Street View.