 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLvio-Fusion: A Self-adaptive Multi-sensor Fusion SLAM Framework Using Actor-critic Method
Jun 12, 2021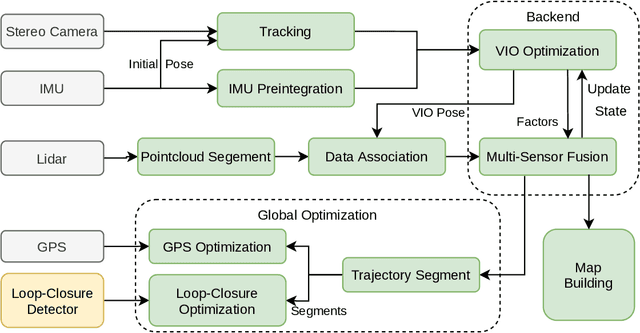
State estimation with sensors is essential for mobile robots. Due to sensors have different performance in different environments, how to fuse measurements of various sensors is a problem. In this paper, we propose a tightly-coupled multi-sensor fusion framework, Lvio-Fusion, which fuses stereo camera, Lidar, IMU, and GPS based on the graph optimization. Especially for urban traffic scenes, we introduce a segmented global pose graph optimization with GPS and loop-closure, which can eliminate accumulated drifts. Additionally, we creatively use a actor-critic method in reinforcement learning to adaptively adjust sensors' weight. After training, actor-critic agent can provide the system with better and dynamic sensors' weight. We evaluate the performance of our system on public datasets and compare it with other state-of-the-art methods, showing that the proposed method achieves high estimation accuracy and robustness to various environments. And our implementations are open source and highly scalable.