 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-Directional Attention for Joint Instance and Semantic Segmentation in Point Clouds
Mar 11, 2020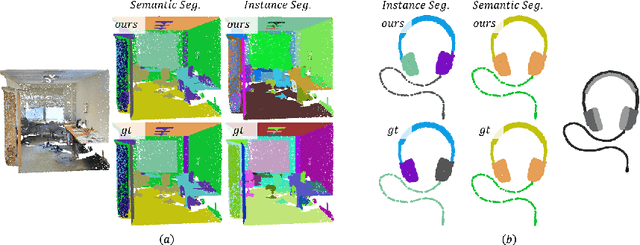

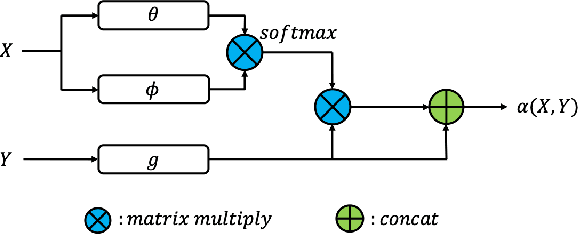
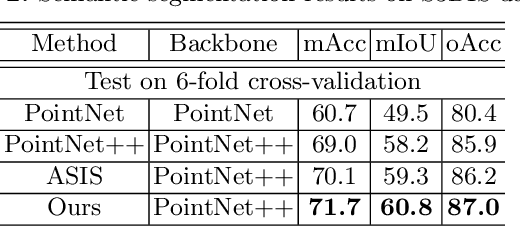
Instance segmentation in point clouds is one of the most fine-grained ways to understand the 3D scene. Due to its close relationship to semantic segmentation, many works approach these two tasks simultaneously and leverage the benefits of multi-task learning. However, most of them only considered simple strategies such as element-wise feature fusion, which may not lead to mutual promotion. In this work, we build a Bi-Directional Attention module on backbone neural networks for 3D point cloud perception, which uses similarity matrix measured from features for one task to help aggregate non-local information for the other task, avoiding the potential feature exclusion and task conflict. From comprehensive experiments and ablation studies on the S3DIS dataset and the PartNet dataset, the superiority of our method is verified. Moreover, the mechanism of how bi-directional attention module helps joint instance and semantic segmentation is also analyzed.