 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMind the Perspective: Let's Reason Recursively for Theory of Mind
Jun 10, 2026Theory of Mind (ToM) reasoning requires inferring agents' beliefs from partial and asymmetric observations, which remains an open challenge for LLMs. Existing prompting-based approaches improve ToM reasoning through observable-event filtering or temporal belief chains, without explicitly modeling nested beliefs. We introduce RecToM, an inference-time framework for ToM reasoning that models nested beliefs via recursive perspective construction. RecToM constructs each character perspective from the preceding character perspective along the character chain specified by the question, reducing higher-order belief questions to actual-world questions within the final constructed perspective. We further provide a KD45 analysis showing that RecToM's perspective construction induces a well-formed belief modality beyond simple event filtering. Experiments on ToM benchmarks, including Hi-ToM, Big-ToM, and FanToM, across multiple LLM backbones show that RecToM consistently outperforms recent advanced approaches, achieving state-of-the-art performance. Notably, RecToM reaches 100\% accuracy on Hi-ToM with GPT-5.4 and Qwen3.5, a benchmark requiring higher-order ToM reasoning.
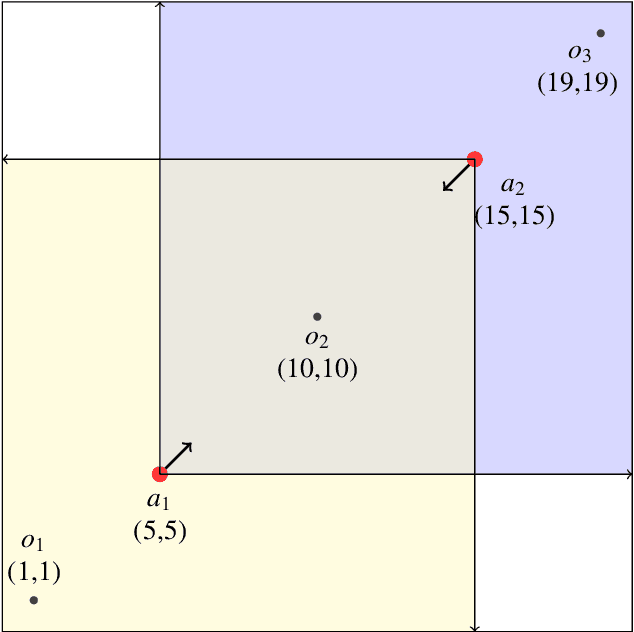
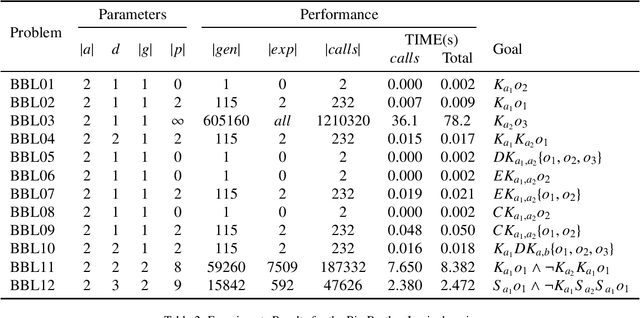
Where Common Knowledge Cannot Be Formed, Common Belief Can -- Planning with Multi-Agent Belief Using Group Justified Perspectives
Dec 10, 2024Epistemic planning is the sub-field of AI planning that focuses on changing knowledge and belief. It is important in both multi-agent domains where agents need to have knowledge/belief regarding the environment, but also the beliefs of other agents, including nested beliefs. When modeling knowledge in multi-agent settings, many models face an exponential growth challenge in terms of nested depth. A contemporary method, known as Planning with Perspectives (PWP), addresses these challenges through the use of perspectives and set operations for knowledge. The JP model defines that an agent's belief is justified if and only if the agent has seen evidence that this belief was true in the past and has not seen evidence to suggest that this has changed. The current paper extends the JP model to handle \emph{group belief}, including distributed belief and common belief. We call this the Group Justified Perspective (GJP) model. Using experimental problems crafted by adapting well-known benchmarks to a group setting, we show the efficiency and expressiveness of our GJP model at handling planning problems that cannot be handled by other epistemic planning tools.
Beyond Static Assumptions: the Predictive Justified Perspective Model for Epistemic Planning
Dec 10, 2024
Epistemic Planning (EP) is an important research area dedicated to reasoning about the knowledge and beliefs of agents in multi-agent cooperative or adversarial settings. The Justified Perspective (JP) model is the state-of-the-art approach to solving EP problems with efficiency and expressiveness. However, all existing EP methods inherit the static environment assumption from classical planning. This limitation hinders the application of EP in fields such as robotics with multi-agent settings, where the environment contains changing variables. In this paper, we propose an extension of the JP model, namely, the Predictive Justified Perspective (PJP) model, to remove this assumption. Instead of assuming that beliefs remain unchanged since the last observation, the PJP model uses all past observations to form predictions about the changing variables. The definition of the prediction function with examples is provided, and it is demonstrated that it can work with arbitrary nesting. We then implemented the PJP model in several well-known domains and compared it with the JP model in the experiments. The results indicated that the PJP model performs exceptionally well across various domains, demonstrating its potential in improving EP applications in robotics.
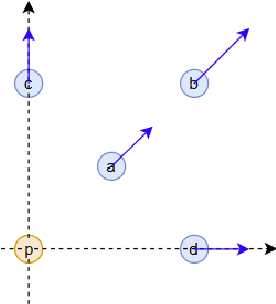
What you get is what you see: Decomposing Epistemic Planning using Functional STRIPS
Apr 02, 2019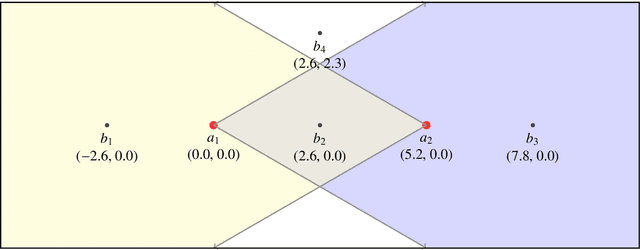
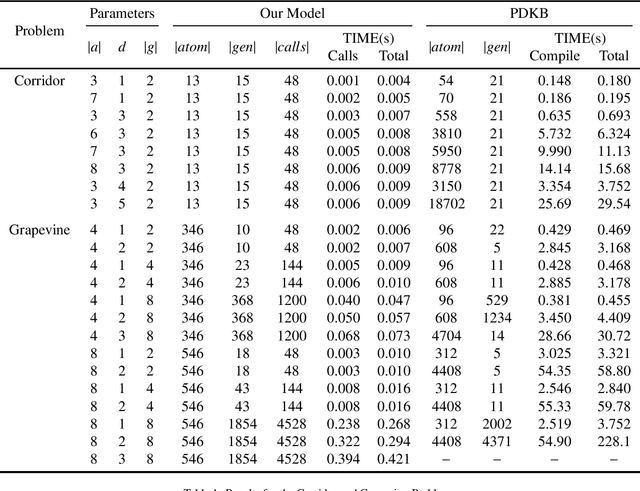
Epistemic planning --- planning with knowledge and belief --- is essential in many multi-agent and human-agent interaction domains. Most state-of-the-art epistemic planners solve this problem by compiling to propositional classical planning, for example, generating all possible knowledge atoms, or compiling epistemic formula to normal forms. However, these methods become computationally infeasible as problems grow. In this paper, we decompose epistemic planning by delegating reasoning about epistemic formula to an external solver. We do this by modelling the problem using \emph{functional STRIPS}, which is more expressive than standard STRIPS and supports the use of external, black-box functions within action models. Exploiting recent work that demonstrates the relationship between what an agent `sees' and what it knows, we allow modellers to provide new implementations of externals functions. These define what agents see in their environment, allowing new epistemic logics to be defined without changing the planner. As a result, it increases the capability and flexibility of the epistemic model itself, and avoids the exponential pre-compilation step. We ran evaluations on well-known epistemic planning benchmarks to compare with an existing state-of-the-art planner, and on new scenarios based on different external functions. The results show that our planner scales significantly better than the state-of-the-art planner against which we compared, and can express problems more succinctly.