 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepthAgent: Towards Better Universal Depth Estimation via Sample-wise Expert Selection
May 22, 2026Monocular metric depth estimation has achieved strong progress with large-scale training and universal-camera modeling, yet robust deployment across diverse camera settings, such as perspective, fisheye, and panoramic images, remains challenging. Existing methods typically rely on a single depth estimator, overlooking that different models encode different camera assumptions and perform best under different input domains. In this paper, we show that depth experts exhibit strong sample-wise complementarity: model preference is highly correlated with camera geometry, and multi-model fusion brings the largest gains on difficult samples where individual experts are unreliable. Motivated by these observations, we propose \textbf{\ours}, a vision-language agent for adaptive monocular depth estimation. DepthAgent treats existing depth models as frozen tools and learns to analyze scene and camera cues, invoke suitable experts through multi-turn tool utilization, and select or fuse their predictions for each input. To optimize such discrete decision-making toward dense geometric quality, we design a multi-reward reinforcement fine-tuning scheme that jointly encourages valid tool execution, camera/scene analysis, expert-selection quality, and inference efficiency. Extensive experiments across perspective, fisheye, and panoramic benchmarks show that \ours consistently outperforms individual experts, fixed model fusion, and different selection strategies, with strong improvements on challenging samples, highlighting the critical role of expert selection and fusion. The code and model will be released upon publication.
UniDAC: Universal Metric Depth Estimation for Any Camera
Mar 28, 2026Monocular metric depth estimation (MMDE) is a core challenge in computer vision, playing a pivotal role in real-world applications that demand accurate spatial understanding. Although prior works have shown promising zero-shot performance in MMDE, they often struggle with generalization across diverse camera types, such as fisheye and $360^\circ$ cameras. Recent advances have addressed this through unified camera representations or canonical representation spaces, but they require either including large-FoV camera data during training or separately trained models for different domains. We propose UniDAC, an MMDE framework that presents universal robustness in all domains and generalizes across diverse cameras using a single model. We achieve this by decoupling metric depth estimation into relative depth prediction and spatially varying scale estimation, enabling robust performance across different domains. We propose a lightweight Depth-Guided Scale Estimation module that upsamples a coarse scale map to high resolution using the relative depth map as guidance to account for local scale variations. Furthermore, we introduce RoPE-$φ$, a distortion-aware positional embedding that respects the spatial warping in Equi-Rectangular Projections (ERP) via latitude-aware weighting. UniDAC achieves state of the art (SoTA) in cross-camera generalization by consistently outperforming prior methods across all datasets.
MonoCoP: Chain-of-Prediction for Monocular 3D Object Detection
May 08, 2025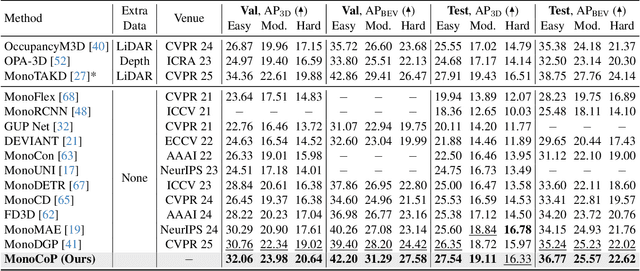
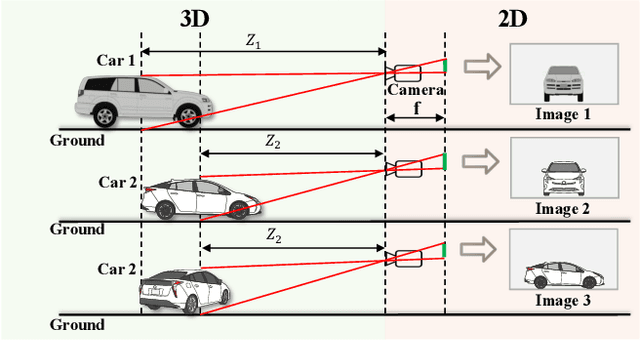
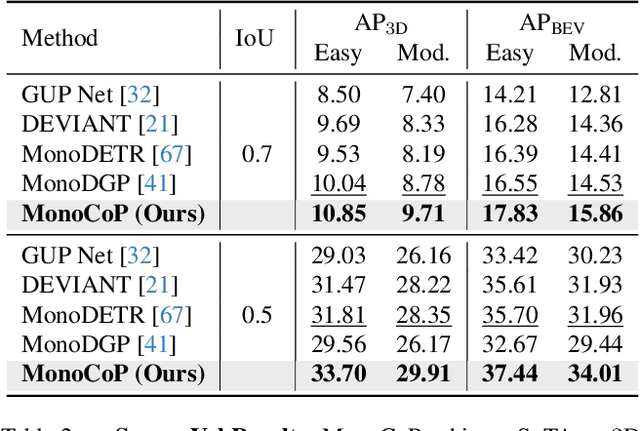
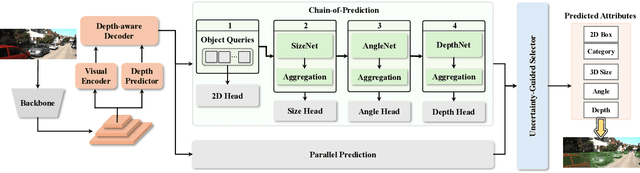
Accurately predicting 3D attributes is crucial for monocular 3D object detection (Mono3D), with depth estimation posing the greatest challenge due to the inherent ambiguity in mapping 2D images to 3D space. While existing methods leverage multiple depth cues (e.g., estimating depth uncertainty, modeling depth error) to improve depth accuracy, they overlook that accurate depth prediction requires conditioning on other 3D attributes, as these attributes are intrinsically inter-correlated through the 3D to 2D projection, which ultimately limits overall accuracy and stability. Inspired by Chain-of-Thought (CoT) in large language models (LLMs), this paper proposes MonoCoP, which leverages a Chain-of-Prediction (CoP) to predict attributes sequentially and conditionally via three key designs. First, it employs a lightweight AttributeNet (AN) for each 3D attribute to learn attribute-specific features. Next, MonoCoP constructs an explicit chain to propagate these learned features from one attribute to the next. Finally, MonoCoP uses a residual connection to aggregate features for each attribute along the chain, ensuring that later attribute predictions are conditioned on all previously processed attributes without forgetting the features of earlier ones. Experimental results show that our MonoCoP achieves state-of-the-art (SoTA) performance on the KITTI leaderboard without requiring additional data and further surpasses existing methods on the Waymo and nuScenes frontal datasets.
RePLAy: Remove Projective LiDAR Depthmap Artifacts via Exploiting Epipolar Geometry
Jul 27, 2024



3D sensing is a fundamental task for Autonomous Vehicles. Its deployment often relies on aligned RGB cameras and LiDAR. Despite meticulous synchronization and calibration, systematic misalignment persists in LiDAR projected depthmap. This is due to the physical baseline distance between the two sensors. The artifact is often reflected as background LiDAR incorrectly projected onto the foreground, such as cars and pedestrians. The KITTI dataset uses stereo cameras as a heuristic solution to remove artifacts. However most AV datasets, including nuScenes, Waymo, and DDAD, lack stereo images, making the KITTI solution inapplicable. We propose RePLAy, a parameter-free analytical solution to remove the projective artifacts. We construct a binocular vision system between a hypothesized virtual LiDAR camera and the RGB camera. We then remove the projective artifacts by determining the epipolar occlusion with the proposed analytical solution. We show unanimous improvement in the State-of-The-Art (SoTA) monocular depth estimators and 3D object detectors with the artifacts-free depthmaps.