 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArc-Length-Based Warping for Robot Skill Synthesis from Multiple Demonstrations
Oct 17, 2024



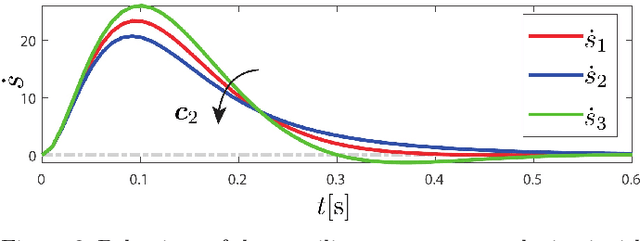
In robotics, Learning from Demonstration (LfD) aims to transfer skills to robots by using multiple demonstrations of the same task. These demonstrations are recorded and processed to extract a consistent skill representation. This process typically requires temporal alignment through techniques such as Dynamic Time Warping (DTW). In this paper, we introduce a novel algorithm, named Spatial Sampling (SS), specifically designed for robot trajectories, that enables time-independent alignment of the trajectories by providing an arc-length parametrization of the signals. This approach eliminates the need for temporal alignment, enhancing the accuracy and robustness of skill representation. Specifically, we show that large time shifts in the demonstrated trajectories can introduce uncertainties in the synthesis of the final trajectory, which alignment in the arc-length domain can drastically reduce, in comparison with various state-of-the-art time-based signal alignment algorithms. To this end, we built a custom publicly available dataset of robot recordings to test real-world trajectories.
A Minimum-Jerk Approach to Handle Singularities in Virtual Fixtures
May 06, 2024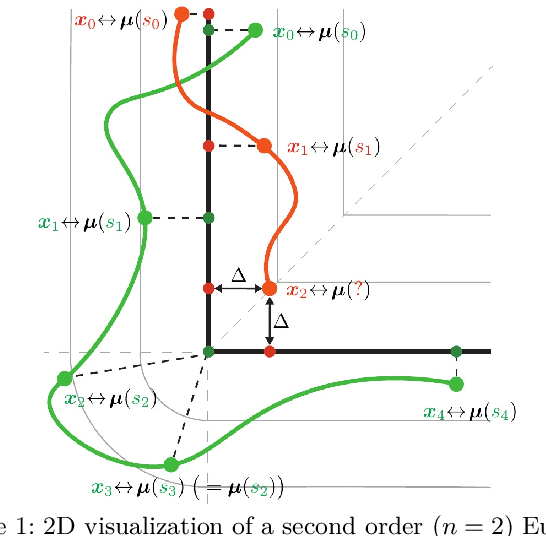


Implementing virtual fixtures in guiding tasks constrains the movement of the robot's end effector to specific curves within its workspace. However, incorporating guiding frameworks may encounter discontinuities when optimizing the reference target position to the nearest point relative to the current robot position. This article aims to give a geometric interpretation of such discontinuities, with specific reference to the commonly adopted Gauss-Newton algorithm. The effect of such discontinuities, defined as Euclidean Distance Singularities, is experimentally proved. We then propose a solution that is based on a Linear Quadratic Tracking problem with minimum jerk command, then compare and validate the performances of the proposed framework in two different human-robot interaction scenarios.
Phase-free Dynamic Movement Primitives Applied to Kinesthetic Guidance in Robotic Co-manipulation Tasks
Jan 16, 2024



When there is a need to define and adapt a robotic task based on a reference motion, Dynamic Movement Primitives (DMP) is a standard and efficient method for encoding it. The nominal trajectory is typically obtained through a Programming by Demonstration (PbD) approach, where the robot is taught a specific task through kinesthetic guidance. Subsequently, the motion is reproduced by the manipulator in terms of both geometric path and timing law. The basic approach for modifying the duration of the execution involves adjusting a time constant characterizing the model. On the contrary, the goal of this paper is to achieve complete decoupling between the geometric information of the task, encoded into the DMP, and the phase law governing the execution, allowing them to be chosen independently. This enables the optimization of the task duration to satisfy constraints such as velocity or acceleration or even to define a phase law dependent on external inputs, such as the force applied by a user in a co-manipulation task. As an example, this mechanism will be exploited to define a rehabilitation activity where the cobot assists humans in performing various pre-planned exercises.