 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Object Detection and Pose Estimation of Unseen Objects in Color Images with Local Surface Embeddings
Oct 08, 2020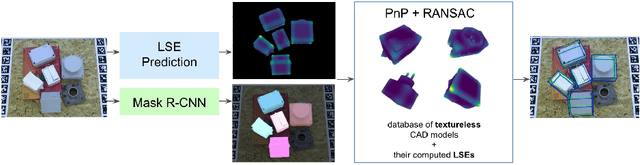

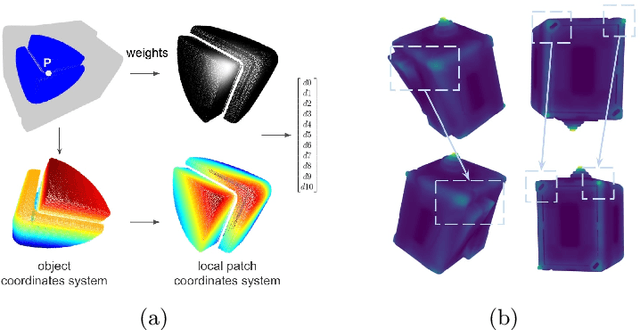
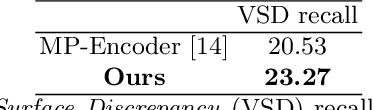
We present an approach for detecting and estimating the 3D poses of objects in images that requires only an untextured CAD model and no training phase for new objects. Our approach combines Deep Learning and 3D geometry: It relies on an embedding of local 3D geometry to match the CAD models to the input images. For points at the surface of objects, this embedding can be computed directly from the CAD model; for image locations, we learn to predict it from the image itself. This establishes correspondences between 3D points on the CAD model and 2D locations of the input images. However, many of these correspondences are ambiguous as many points may have similar local geometries. We show that we can use Mask-RCNN in a class-agnostic way to detect the new objects without retraining and thus drastically limit the number of possible correspondences. We can then robustly estimate a 3D pose from these discriminative correspondences using a RANSAC- like algorithm. We demonstrate the performance of this approach on the T-LESS dataset, by using a small number of objects to learn the embedding and testing it on the other objects. Our experiments show that our method is on par or better than previous methods.
CorNet: Generic 3D Corners for 6D Pose Estimation of New Objects without Retraining
Aug 29, 2019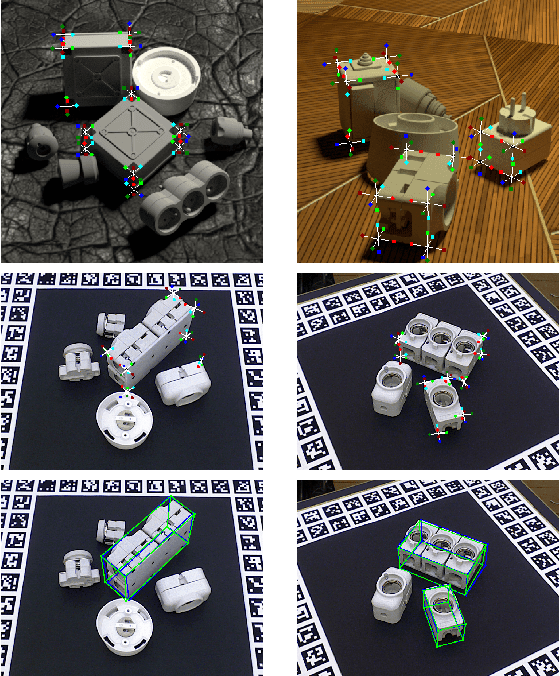
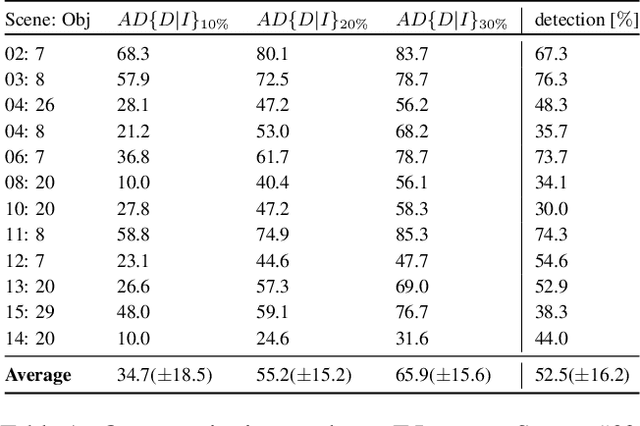
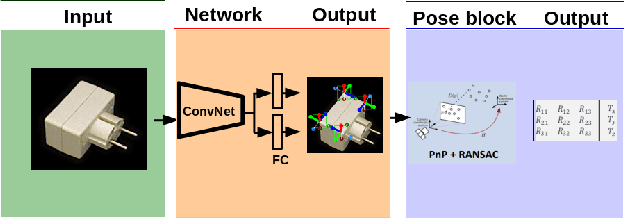
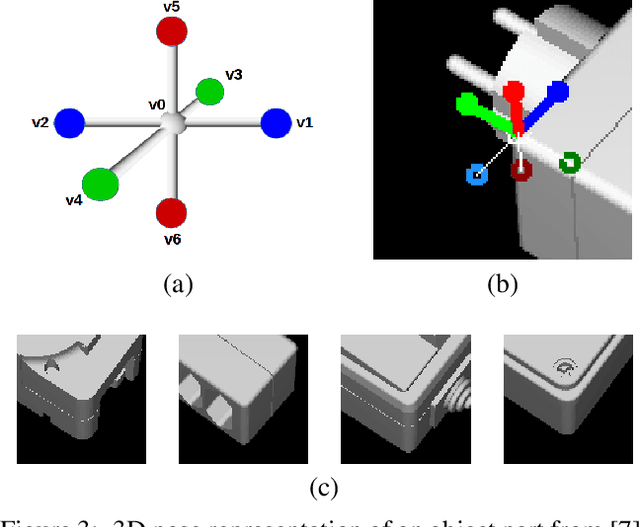
We present a novel approach to the detection and 3D pose estimation of objects in color images. Its main contribution is that it does not require any training phases nor data for new objects, while state-of-the-art methods typically require hours of training time and hundreds of training registered images. Instead, our method relies only on the objects' geometries. Our method focuses on objects with prominent corners, which covers a large number of industrial objects. We first learn to detect object corners of various shapes in images and also to predict their 3D poses, by using training images of a small set of objects. To detect a new object in a given image, we first identify its corners from its CAD model; we also detect the corners visible in the image and predict their 3D poses. We then introduce a RANSAC-like algorithm that robustly and efficiently detects and estimates the object's 3D pose by matching its corners on the CAD model with their detected counterparts in the image. Because we also estimate the 3D poses of the corners in the image, detecting only 1 or 2 corners is sufficient to estimate the pose of the object, which makes the approach robust to occlusions. We finally rely on a final check that exploits the full 3D geometry of the objects, in case multiple objects have the same corner spatial arrangement. The advantages of our approach make it particularly attractive for industrial contexts, and we demonstrate our approach on the challenging T-LESS dataset.
On Object Symmetries and 6D Pose Estimation from Images
Aug 20, 2019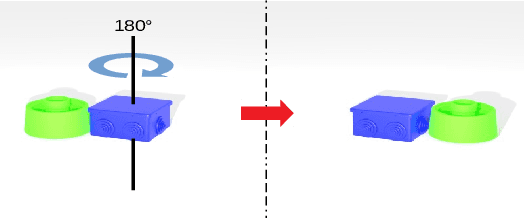
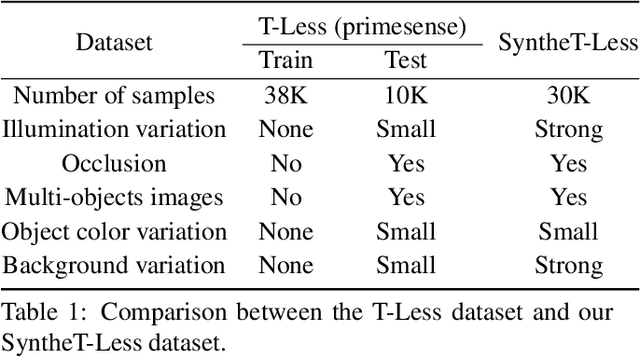
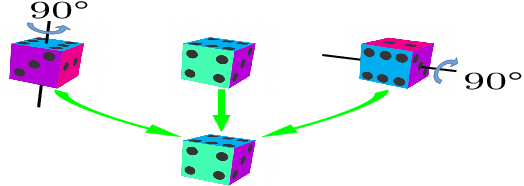
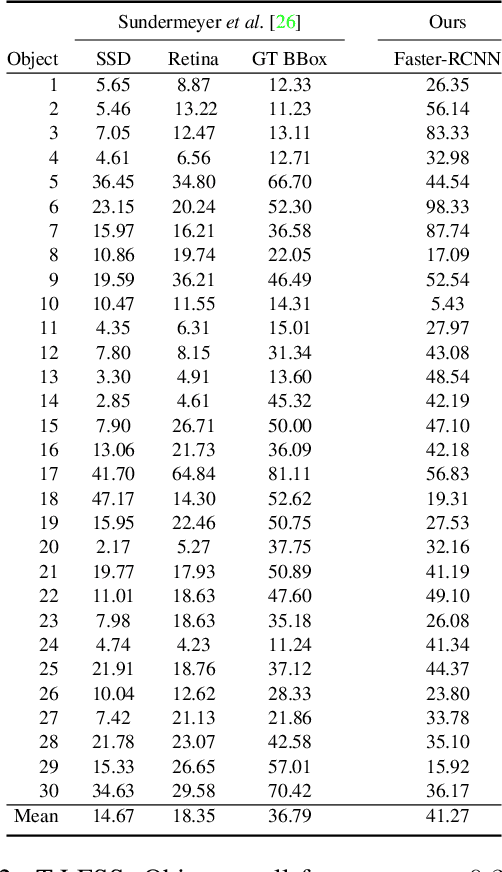
Objects with symmetries are common in our daily life and in industrial contexts, but are often ignored in the recent literature on 6D pose estimation from images. In this paper, we study in an analytical way the link between the symmetries of a 3D object and its appearance in images. We explain why symmetrical objects can be a challenge when training machine learning algorithms that aim at estimating their 6D pose from images. We propose an efficient and simple solution that relies on the normalization of the pose rotation. Our approach is general and can be used with any 6D pose estimation algorithm. Moreover, our method is also beneficial for objects that are 'almost symmetrical', i.e. objects for which only a detail breaks the symmetry. We validate our approach within a Faster-RCNN framework on a synthetic dataset made with objects from the T-Less dataset, which exhibit various types of symmetries, as well as real sequences from T-Less.