 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHandling robot constraints within a Set-Based Multi-Task Priority Inverse Kinematics Framework
May 30, 2019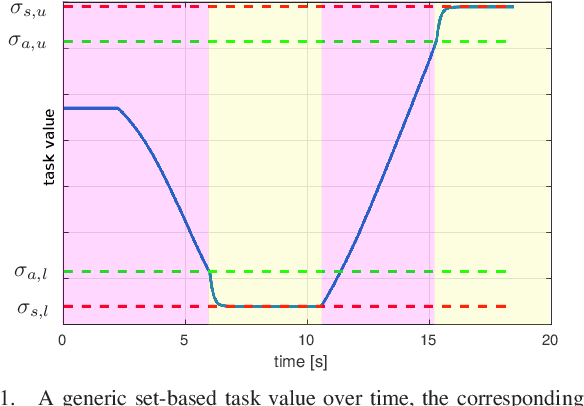
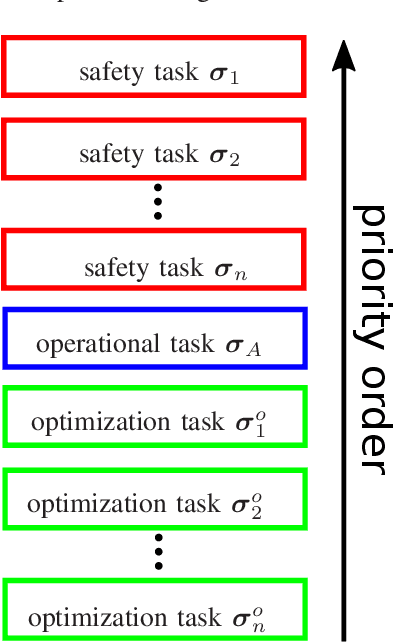
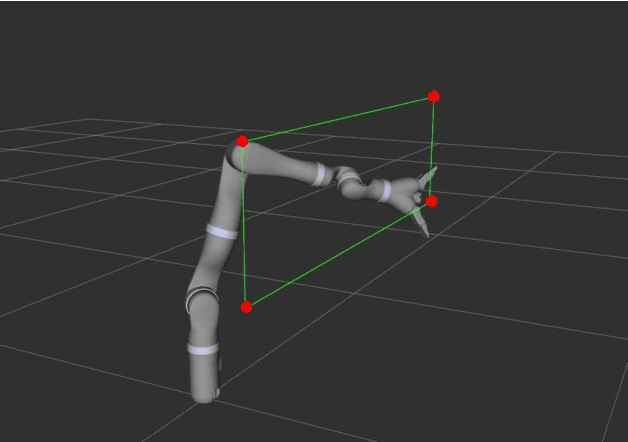
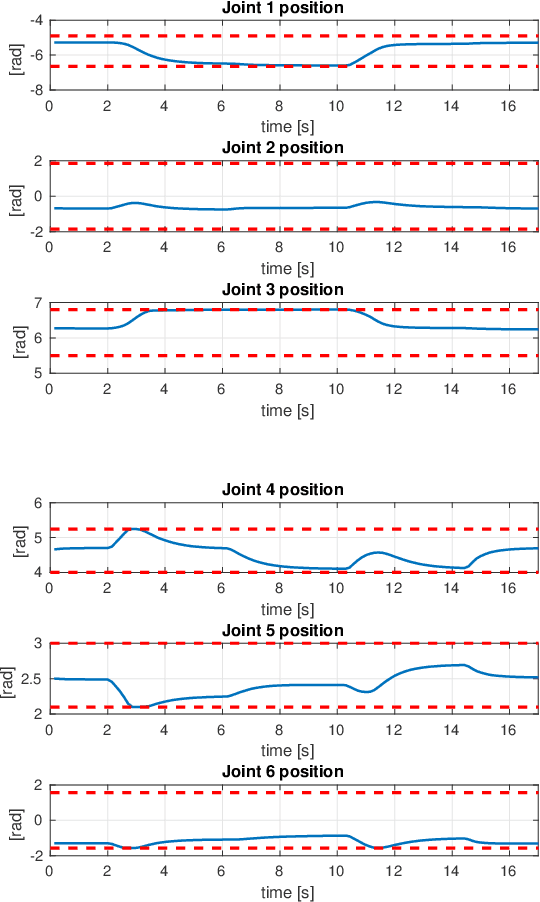
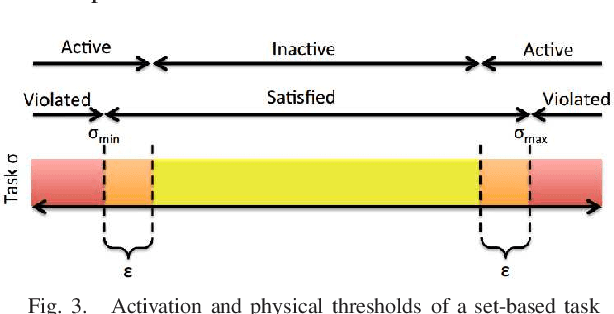
Set-Based Multi-Task Priority is a recent framework to handle inverse kinematics for redundant structures. Both equality tasks, i.e., control objectives to be driven to a desired value, and set-bases tasks, i.e., control objectives to be satisfied with a set/range of values can be addressed in a rigorous manner within a priority framework. In addition, optimization tasks, driven by the gradient of a proper function, may be considered as well, usually as lower priority tasks. In this paper the proper design of the tasks, their priority and the use of a Set-Based Multi-Task Priority framework is proposed in order to handle several constraints simultaneously in real-time. It is shown that safety related tasks such as, e.g., joint limits or kinematic singularity, may be properly handled by consider them both at an higher priority as set-based task and at a lower within a proper optimization functional. Experimental results on a 7DOF Jaco$^2$
Assistive robot operated via P300-based Brain Computer Interface
May 30, 2019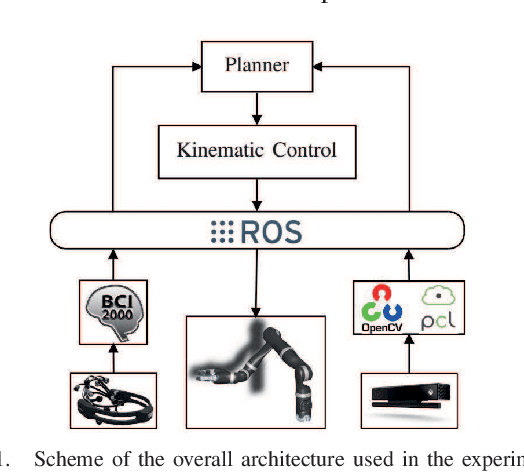
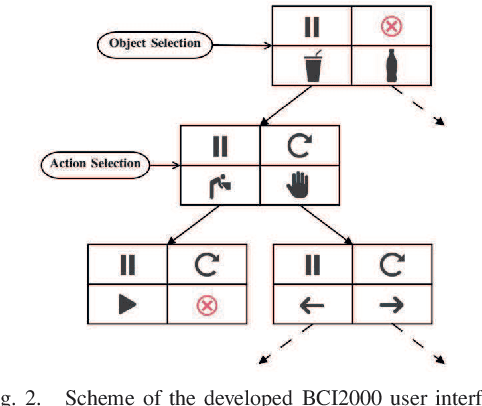
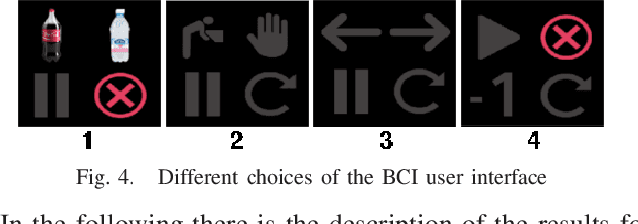
In this paper we present an architecture for the operation of an assistive robot finally aimed at allowing users with severe motion disabilities to perform manipulation tasks that may help in daily-life operations. The robotic system, based on a lightweight robot manipulator, receives high level commands from the user through a Brain-Computer Interface based on P300 paradigm. The motion of the manipulator is controlled relying on a closed loop inverse kinematic algorithm that simultaneously manages multiple set-based and equality-based tasks. The software architecture is developed relying on widely used frameworks to operate BCIs and robots (namely, BCI2000 for the operation of the BCI and ROS for the control of the manipulator) integrating control, perception and communication modules developed for the application at hand. Preliminary experiments have been conducted to show the potentialities of the developed architecture.
Safety-related Tasks within the Set-Based Task-Priority Inverse Kinematics Framework
May 29, 2019
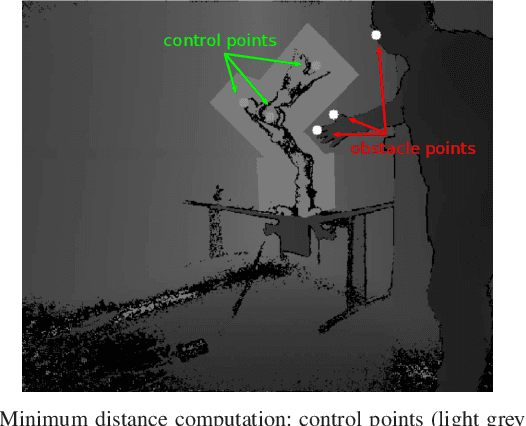
In this paper we present a framework that allows the motion control of a robotic arm automatically handling different kinds of safety-related tasks. The developed controller is based on a Task-Priority Inverse Kinematics algorithm that allows the manipulator's motion while respecting constraints defined either in the joint or in the operational space in the form of equality-based or set-based tasks. This gives the possibility to define, among the others, tasks as joint-limits, obstacle avoidance or limiting the workspace in the operational space. Additionally, an algorithm for the real-time computation of the minimum distance between the manipulator and other objects in the environment using depth measurements has been implemented, effectively allowing obstacle avoidance tasks. Experiments with a Jaco$^2$ manipulator, operating in an environment where an RGB-D sensor is used for the obstacles detection, show the effectiveness of the developed system.