 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHandling robot constraints within a Set-Based Multi-Task Priority Inverse Kinematics Framework
Paper and Code
May 30, 2019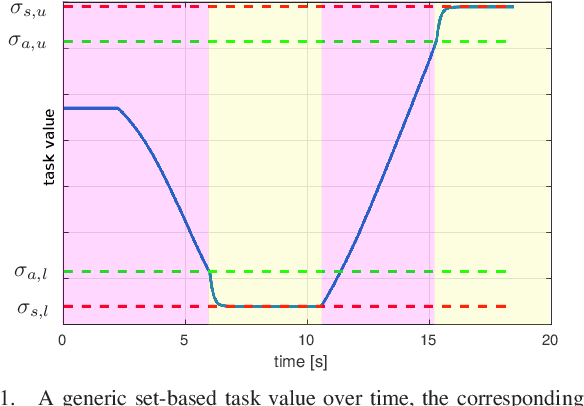
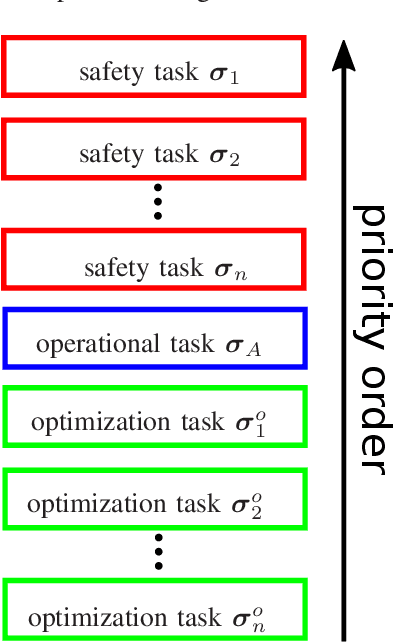
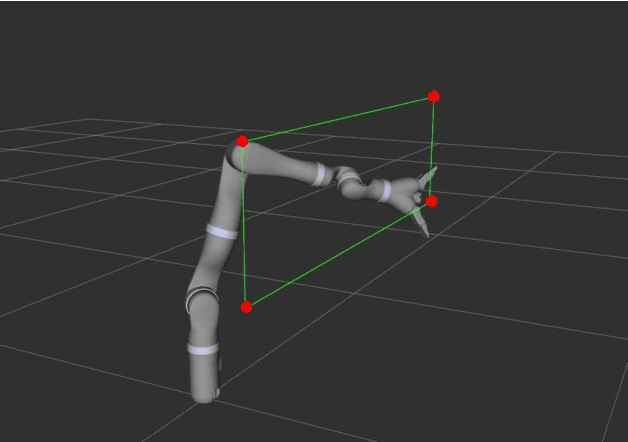
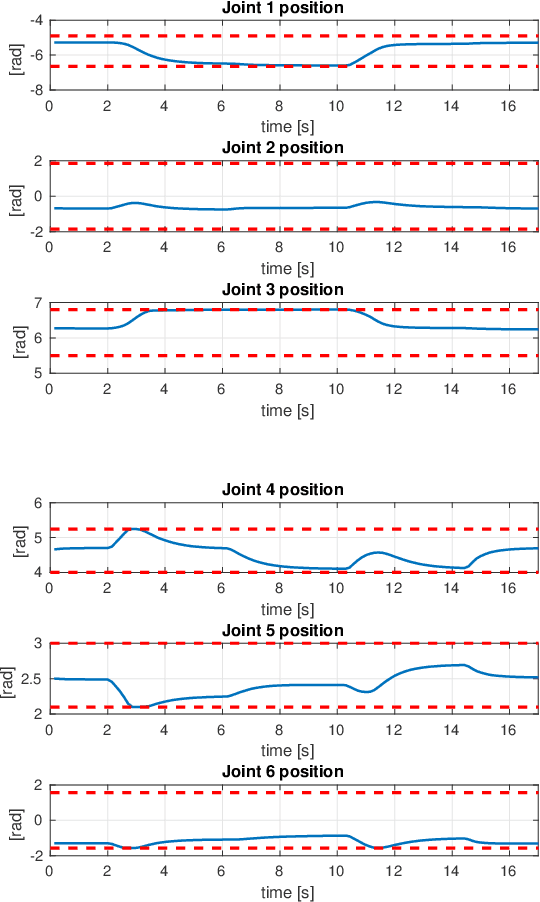
Set-Based Multi-Task Priority is a recent framework to handle inverse kinematics for redundant structures. Both equality tasks, i.e., control objectives to be driven to a desired value, and set-bases tasks, i.e., control objectives to be satisfied with a set/range of values can be addressed in a rigorous manner within a priority framework. In addition, optimization tasks, driven by the gradient of a proper function, may be considered as well, usually as lower priority tasks. In this paper the proper design of the tasks, their priority and the use of a Set-Based Multi-Task Priority framework is proposed in order to handle several constraints simultaneously in real-time. It is shown that safety related tasks such as, e.g., joint limits or kinematic singularity, may be properly handled by consider them both at an higher priority as set-based task and at a lower within a proper optimization functional. Experimental results on a 7DOF Jaco$^2$