 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-related Tasks within the Set-Based Task-Priority Inverse Kinematics Framework
Paper and Code
May 29, 2019
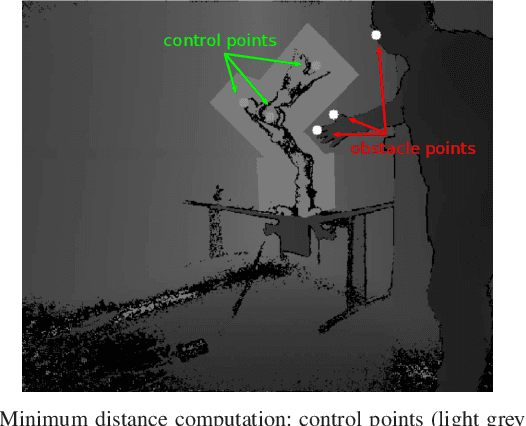
In this paper we present a framework that allows the motion control of a robotic arm automatically handling different kinds of safety-related tasks. The developed controller is based on a Task-Priority Inverse Kinematics algorithm that allows the manipulator's motion while respecting constraints defined either in the joint or in the operational space in the form of equality-based or set-based tasks. This gives the possibility to define, among the others, tasks as joint-limits, obstacle avoidance or limiting the workspace in the operational space. Additionally, an algorithm for the real-time computation of the minimum distance between the manipulator and other objects in the environment using depth measurements has been implemented, effectively allowing obstacle avoidance tasks. Experiments with a Jaco$^2$ manipulator, operating in an environment where an RGB-D sensor is used for the obstacles detection, show the effectiveness of the developed system.