 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Data-Driven Approach for Contact Detection, Classification and Reaction in Physical Human-Robot Collaboration
Jun 12, 2021



This paper considers a scenario where a robot and a human operator share the same workspace, and the robot is able to both carry out autonomous tasks and physically interact with the human in order to achieve common goals. In this context, both intentional and accidental contacts between human and robot might occur due to the complexity of tasks and environment, to the uncertainty of human behavior, and to the typical lack of awareness of each other actions. Here, a two stage strategy based on Recurrent Neural Networks (RNNs) is designed to detect intentional and accidental contacts: the occurrence of a contact with the human is detected at the first stage, while the classification between intentional and accidental is performed at the second stage. An admittance control strategy or an evasive action is then performed by the robot, respectively. The approach also works in the case the robot simultaneously interacts with the human and the environment, where the interaction wrench of the latter is modeled via Gaussian Mixture Models (GMMs). Control Barrier Functions (CBFs) are included, at the control level, to guarantee the satisfaction of robot and task constraints while performing the proper interaction strategy. The approach has been validated on a real setup composed of a Kinova Jaco2 robot.
Assistive robot operated via P300-based Brain Computer Interface
May 30, 2019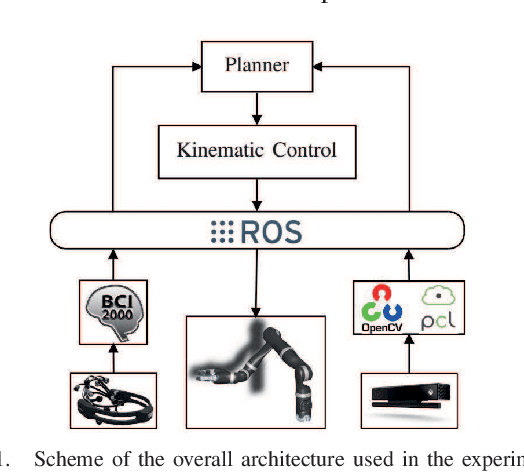
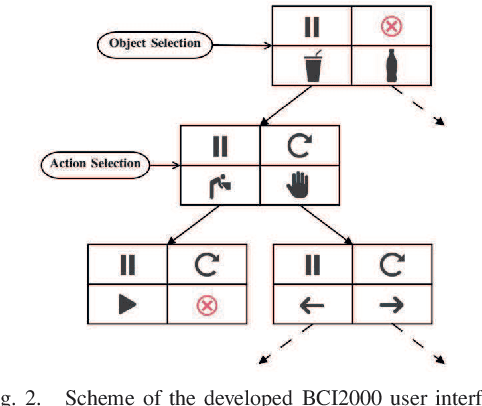
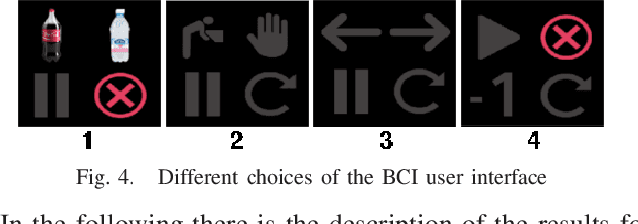
In this paper we present an architecture for the operation of an assistive robot finally aimed at allowing users with severe motion disabilities to perform manipulation tasks that may help in daily-life operations. The robotic system, based on a lightweight robot manipulator, receives high level commands from the user through a Brain-Computer Interface based on P300 paradigm. The motion of the manipulator is controlled relying on a closed loop inverse kinematic algorithm that simultaneously manages multiple set-based and equality-based tasks. The software architecture is developed relying on widely used frameworks to operate BCIs and robots (namely, BCI2000 for the operation of the BCI and ROS for the control of the manipulator) integrating control, perception and communication modules developed for the application at hand. Preliminary experiments have been conducted to show the potentialities of the developed architecture.
Safety-related Tasks within the Set-Based Task-Priority Inverse Kinematics Framework
May 29, 2019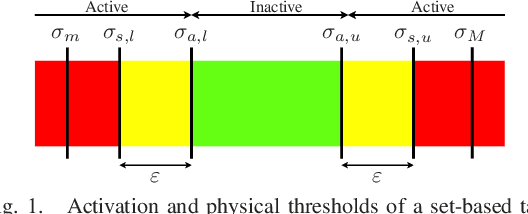
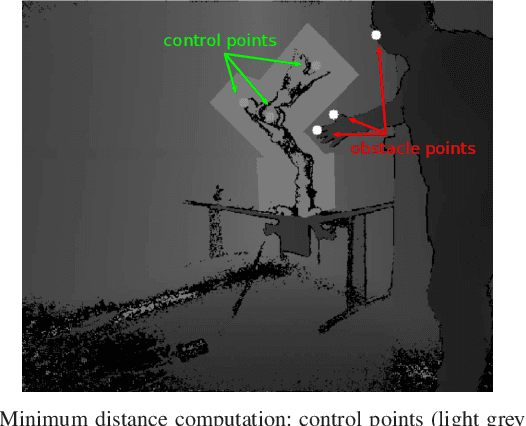
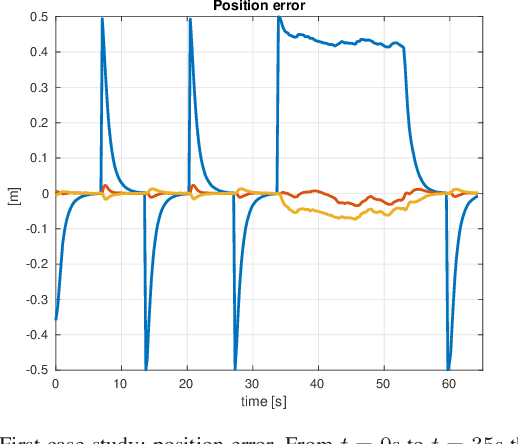
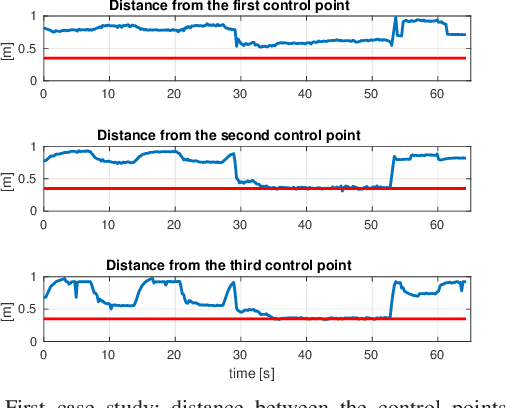
In this paper we present a framework that allows the motion control of a robotic arm automatically handling different kinds of safety-related tasks. The developed controller is based on a Task-Priority Inverse Kinematics algorithm that allows the manipulator's motion while respecting constraints defined either in the joint or in the operational space in the form of equality-based or set-based tasks. This gives the possibility to define, among the others, tasks as joint-limits, obstacle avoidance or limiting the workspace in the operational space. Additionally, an algorithm for the real-time computation of the minimum distance between the manipulator and other objects in the environment using depth measurements has been implemented, effectively allowing obstacle avoidance tasks. Experiments with a Jaco$^2$ manipulator, operating in an environment where an RGB-D sensor is used for the obstacles detection, show the effectiveness of the developed system.
Connectivity maintenance by robotic Mobile Ad-hoc NETwork
Dec 09, 2013



The problem of maintaining a wireless communication link between a fixed base station and an autonomous agent by means of a team of mobile robots is addressed in this work. Such problem can be of interest for search and rescue missions in post disaster scenario where the autonomous agent can be used for remote monitoring and first hand knowledge of the aftermath, while the mobile robots can be used to provide the agent the possibility to dynamically send its collected information to an external base station. To study the problem, a distributed multi-robot system with wifi communication capabilities has been developed and used to implement a Mobile Ad-hoc NETwork (MANET) to guarantee the required multi-hop communication. None of the robots of the team possess the knowledge of agent's movement, neither they hold a pre-assigned position in the ad-hoc network but they adapt with respect to the dynamic environmental situations. This adaptation only requires the robots to have the knowledge of their position and the possibility to exchange such information with their one-hop neighbours. Robots' motion is achieved by implementing a behavioural control, namely the Null-Space based Behavioural control, embedding the collective mission to achieve the required self-configuration. Validation of the approach is performed by means of demanding experimental tests involving five ground mobile robots capable of self localization and dynamic obstacle avoidance.