 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR-SNN: An Analysis and Design Methodology for Robustifying Spiking Neural Networks against Adversarial Attacks through Noise Filters for Dynamic Vision Sensors
Sep 01, 2021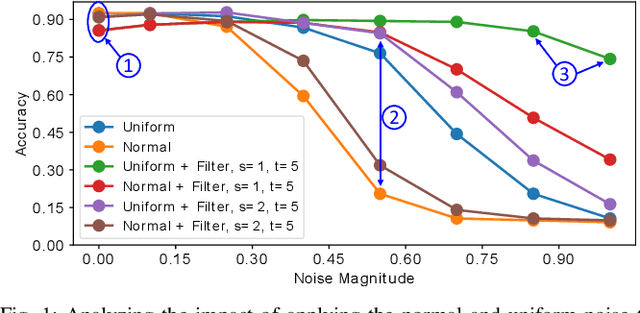

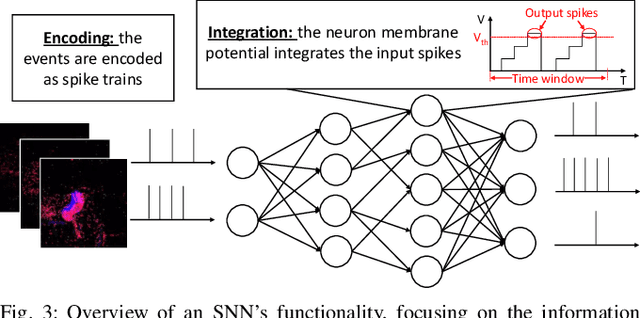
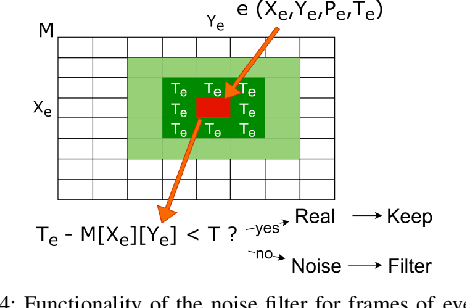
Spiking Neural Networks (SNNs) aim at providing energy-efficient learning capabilities when implemented on neuromorphic chips with event-based Dynamic Vision Sensors (DVS). This paper studies the robustness of SNNs against adversarial attacks on such DVS-based systems, and proposes R-SNN, a novel methodology for robustifying SNNs through efficient DVS-noise filtering. We are the first to generate adversarial attacks on DVS signals (i.e., frames of events in the spatio-temporal domain) and to apply noise filters for DVS sensors in the quest for defending against adversarial attacks. Our results show that the noise filters effectively prevent the SNNs from being fooled. The SNNs in our experiments provide more than 90% accuracy on the DVS-Gesture and NMNIST datasets under different adversarial threat models.
DVS-Attacks: Adversarial Attacks on Dynamic Vision Sensors for Spiking Neural Networks
Jul 01, 2021
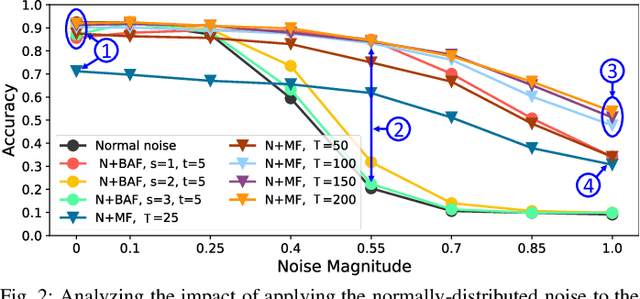


Spiking Neural Networks (SNNs), despite being energy-efficient when implemented on neuromorphic hardware and coupled with event-based Dynamic Vision Sensors (DVS), are vulnerable to security threats, such as adversarial attacks, i.e., small perturbations added to the input for inducing a misclassification. Toward this, we propose DVS-Attacks, a set of stealthy yet efficient adversarial attack methodologies targeted to perturb the event sequences that compose the input of the SNNs. First, we show that noise filters for DVS can be used as defense mechanisms against adversarial attacks. Afterwards, we implement several attacks and test them in the presence of two types of noise filters for DVS cameras. The experimental results show that the filters can only partially defend the SNNs against our proposed DVS-Attacks. Using the best settings for the noise filters, our proposed Mask Filter-Aware Dash Attack reduces the accuracy by more than 20% on the DVS-Gesture dataset and by more than 65% on the MNIST dataset, compared to the original clean frames. The source code of all the proposed DVS-Attacks and noise filters is released at https://github.com/albertomarchisio/DVS-Attacks.