 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSceneFlowFields++: Multi-frame Matching, Visibility Prediction, and Robust Interpolation for Scene Flow Estimation
Feb 26, 2019

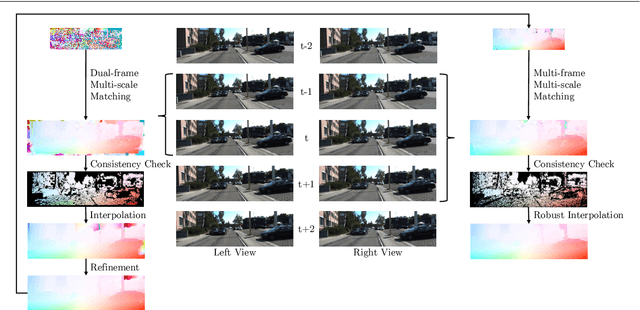

State-of-the-art scene flow algorithms pursue the conflicting targets of accuracy, run time, and robustness. With the successful concept of pixel-wise matching and sparse-to-dense interpolation, we push the limits of scene flow estimation. Avoiding strong assumptions on the domain or the problem yields a more robust algorithm. This algorithm is fast because we avoid explicit regularization during matching, which allows an efficient computation. Using image information from multiple time steps and explicit visibility prediction based on previous results, we achieve competitive performances on different data sets. Our contributions and results are evaluated in comparative experiments. Overall, we present an accurate scene flow algorithm that is faster and more generic than any individual benchmark leader.
SceneFlowFields: Dense Interpolation of Sparse Scene Flow Correspondences
Oct 27, 2017



While most scene flow methods use either variational optimization or a strong rigid motion assumption, we show for the first time that scene flow can also be estimated by dense interpolation of sparse matches. To this end, we find sparse matches across two stereo image pairs that are detected without any prior regularization and perform dense interpolation preserving geometric and motion boundaries by using edge information. A few iterations of variational energy minimization are performed to refine our results, which are thoroughly evaluated on the KITTI benchmark and additionally compared to state-of-the-art on MPI Sintel. For application in an automotive context, we further show that an optional ego-motion model helps to boost performance and blends smoothly into our approach to produce a segmentation of the scene into static and dynamic parts.