 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne Problem, One Solution: Unifying Robot and Environment Design Optimization
Oct 09, 2023



The task-specific optimization of robotic systems has long been divided into the optimization of the robot and the optimization of the environment. In this letter, we argue that these two problems are interdependent and should be treated as such. To this end, we present a unified problem formulation that enables for the simultaneous optimization of both the robot kinematics and the environment. We demonstrate the effectiveness of our approach by jointly optimizing a robotic milling system. To compare our approach to the state of the art we also optimize the robot kinematics and environment separately. The results show that our approach outperforms the state of the art and that simultaneous optimization leads to a much better solution.
Dynamic collision avoidance for multiple robotic manipulators based on a non-cooperative multi-agent game
Feb 28, 2021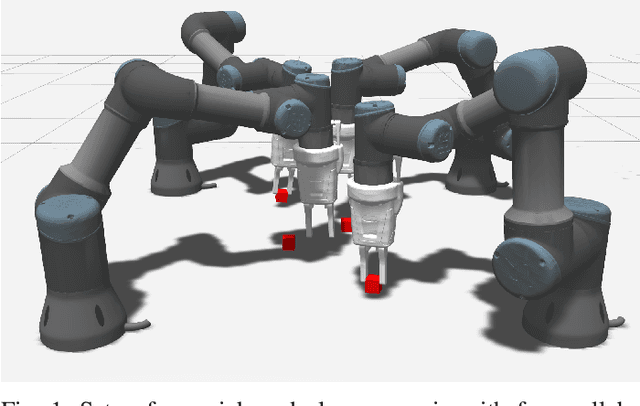
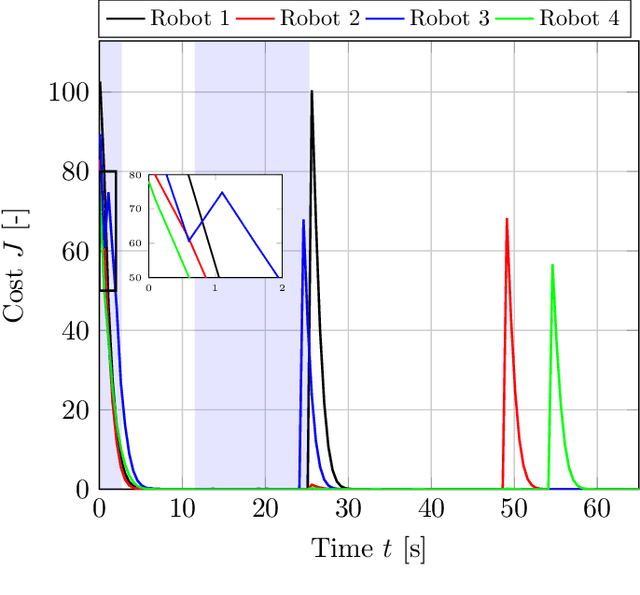
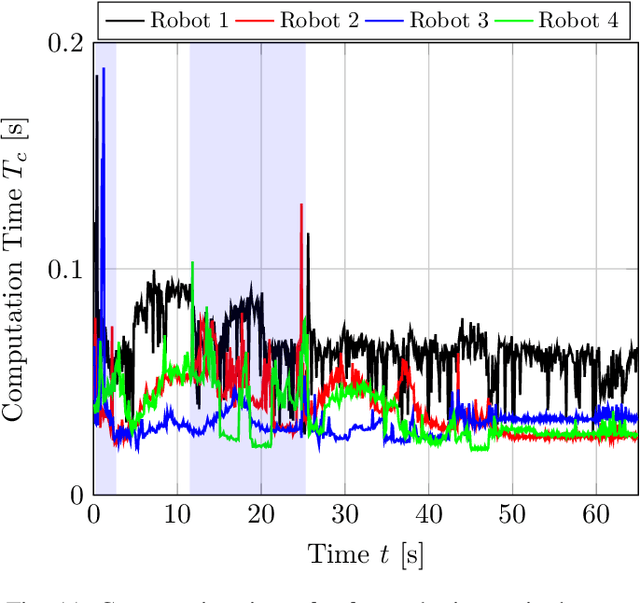

A flexible operation of multiple robotic manipulators in a shared workspace requires an online trajectory planning with static and dynamic collision avoidance. In this work, we propose a real-time capable motion control algorithm, based on non-linear model predictive control, which accounts for static and dynamic collision avoidance. The proposed algorithm is formulated as a non-cooperative game, where each robot is considered as an agent. Each agent optimizes its own motion and accounts for the predicted movement of surrounding agents. We propose a novel approach to formulate the dynamic collision constraints. Additionally, we account for deadlocks that might occur in a setup of multiple robotic manipulators. We validate our algorithm on a pick and place scenario for four collaborative robots operating in a common workspace in the simulation environment Gazebo. The robots are controlled by the Robot Operating System (ROS). We demonstrate, that our approach is real-time capable and, due to the distributed nature of the approach, easily scales to an arbitrary number of robot manipulators in a shared workspace.