 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegVisRL: Visuomotor Development for a Lunar Rover for Hazard Avoidance using Camera Images
Mar 26, 2021
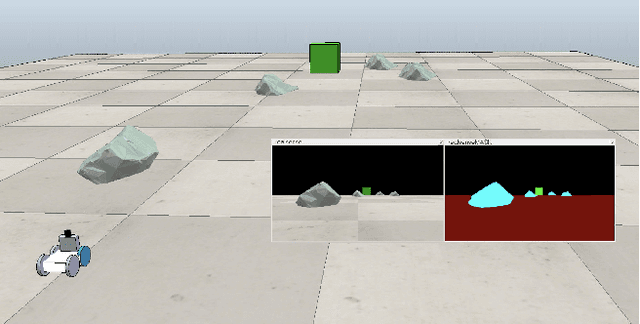
The visuomotor system of any animal is critical for its survival, and the development of a complex one within humans is large factor in our success as a species on Earth. This system is an essential part of our ability to adapt to our environment. We use this system continuously throughout the day, when picking something up, or walking around while avoiding bumping into objects. Equipping robots with such capabilities will help produce more intelligent locomotion with the ability to more easily understand their surroundings and to move safely. In particular, such capabilities are desirable for traversing the lunar surface, as it is full of hazardous obstacles, such as rocks. These obstacles need to be identified and avoided in real time. This paper seeks to demonstrate the development of a visuomotor system within a robot for navigation and obstacle avoidance, with complex rock shaped objects representing hazards. Our approach uses deep reinforcement learning with only image data. In this paper, we compare the results from several neural network architectures and a preprocessing methodology which includes producing a segmented image and downsampling.
RL STaR Platform: Reinforcement Learning for Simulation based Training of Robots
Sep 21, 2020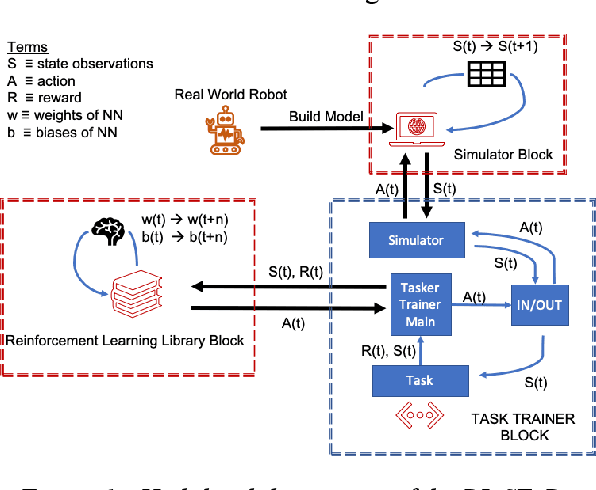
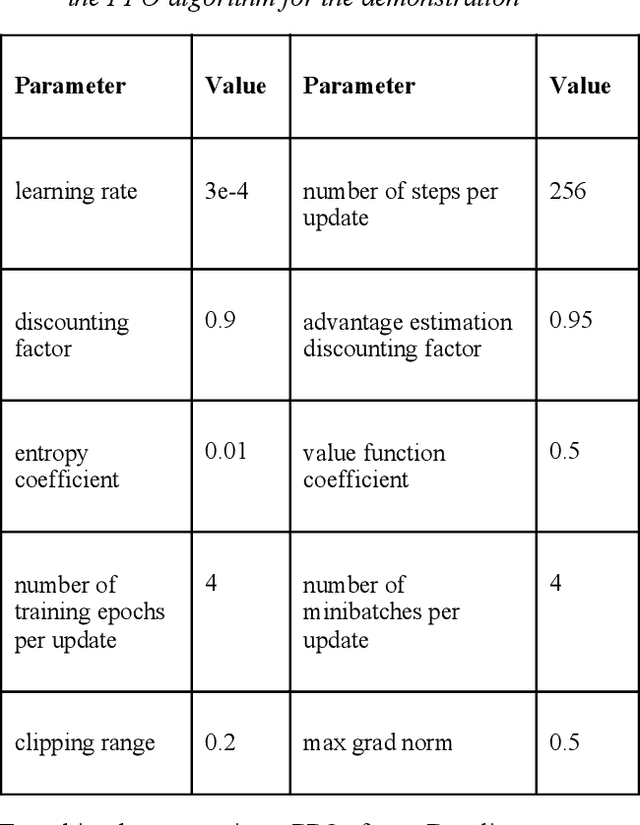
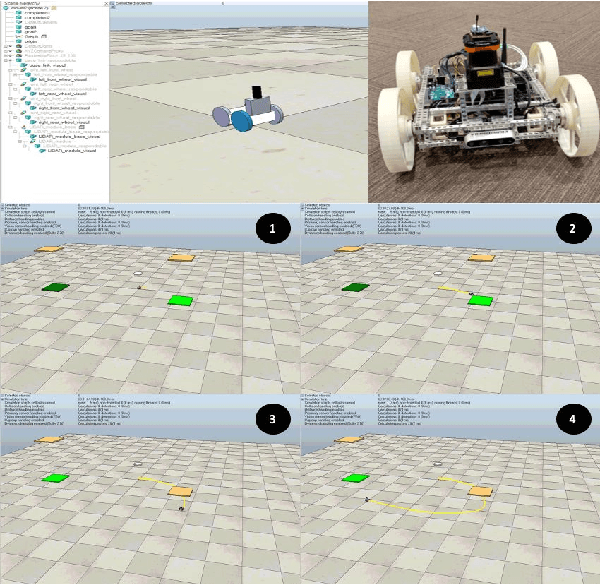
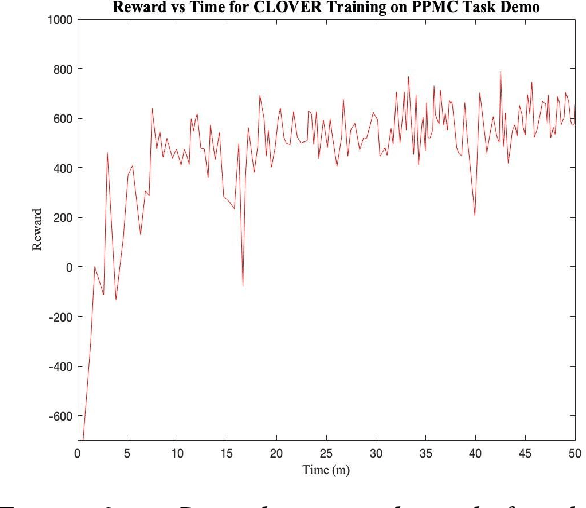
Reinforcement learning (RL) is a promising field to enhance robotic autonomy and decision making capabilities for space robotics, something which is challenging with traditional techniques due to stochasticity and uncertainty within the environment. RL can be used to enable lunar cave exploration with infrequent human feedback, faster and safer lunar surface locomotion or the coordination and collaboration of multi-robot systems. However, there are many hurdles making research challenging for space robotic applications using RL and machine learning, particularly due to insufficient resources for traditional robotics simulators like CoppeliaSim. Our solution to this is an open source modular platform called Reinforcement Learning for Simulation based Training of Robots, or RL STaR, that helps to simplify and accelerate the application of RL to the space robotics research field. This paper introduces the RL STaR platform, and how researchers can use it through a demonstration.