 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRL STaR Platform: Reinforcement Learning for Simulation based Training of Robots
Paper and Code
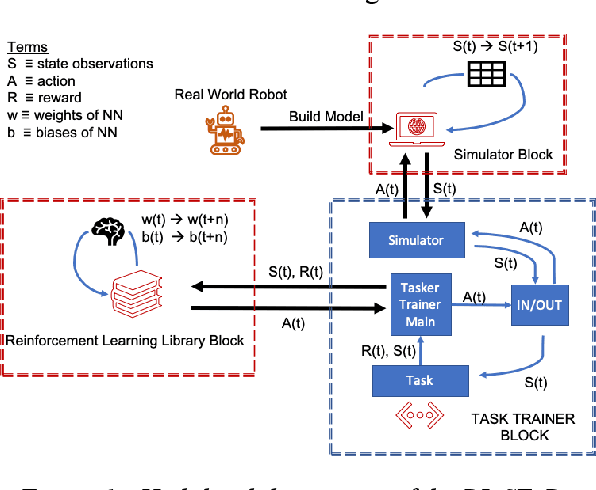
Reinforcement learning (RL) is a promising field to enhance robotic autonomy and decision making capabilities for space robotics, something which is challenging with traditional techniques due to stochasticity and uncertainty within the environment. RL can be used to enable lunar cave exploration with infrequent human feedback, faster and safer lunar surface locomotion or the coordination and collaboration of multi-robot systems. However, there are many hurdles making research challenging for space robotic applications using RL and machine learning, particularly due to insufficient resources for traditional robotics simulators like CoppeliaSim. Our solution to this is an open source modular platform called Reinforcement Learning for Simulation based Training of Robots, or RL STaR, that helps to simplify and accelerate the application of RL to the space robotics research field. This paper introduces the RL STaR platform, and how researchers can use it through a demonstration.