 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian Programming Approach to Car-following Model Calibration and Validation using Limited Data
Jul 19, 2023Traffic simulation software is used by transportation researchers and engineers to design and evaluate changes to roadways. These simulators are driven by models of microscopic driver behavior from which macroscopic measures like flow and congestion can be derived. Many models are designed for a subset of possible traffic scenarios and roadway configurations, while others have no explicit constraints on their application. Work zones (WZs) are one scenario for which no model to date has reproduced realistic driving behavior. This makes it difficult to optimize for safety and other metrics when designing a WZ. The Federal Highway Administration commissioned the USDOT Volpe Center to develop a car-following (CF) model for use in microscopic simulators that can capture and reproduce driver behavior accurately within and outside of WZs. Volpe also performed a naturalistic driving study to collect telematics data from vehicles driven on roads with WZs for use in model calibration. During model development, Volpe researchers observed difficulties in calibrating their model, leaving them to question whether there existed flaws in their model, in the data, or in the procedure used to calibrate the model using the data. In this thesis, I use Bayesian methods for data analysis and parameter estimation to explore and, where possible, address these questions. First, I use Bayesian inference to measure the sufficiency of the size of the data set. Second, I compare the procedure and results of the genetic algorithm based calibration performed by the Volpe researchers with those of Bayesian calibration. Third, I explore the benefits of modeling CF hierarchically. Finally, I apply what was learned in the first three phases using an established CF model, Wiedemann 99, to the probabilistic modeling of the Volpe model. Validation is performed using information criteria as an estimate of predictive accuracy.
Strengthening the Case for a Bayesian Approach to Car-following Model Calibration and Validation using Probabilistic Programming
Aug 07, 2019

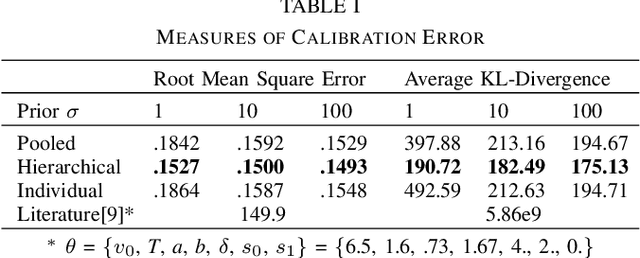
Compute and memory constraints have historically prevented traffic simulation software users from fully utilizing the predictive models underlying them. When calibrating car-following models, particularly, accommodations have included 1) using sensitivity analysis to limit the number of parameters to be calibrated, and 2) identifying only one set of parameter values using data collected from multiple car-following instances across multiple drivers. Shortcuts are further motivated by insufficient data set sizes, for which a driver may have too few instances to fully account for the variation in their driving behavior. In this paper, we demonstrate that recent technological advances can enable transportation researchers and engineers to overcome these constraints and produce calibration results that 1) outperform industry standard approaches, and 2) allow for a unique set of parameters to be estimated for each driver in a data set, even given a small amount of data. We propose a novel calibration procedure for car-following models based on Bayesian machine learning and probabilistic programming, and apply it to real-world data from a naturalistic driving study. We also discuss how this combination of mathematical and software tools can offer additional benefits such as more informative model validation and the incorporation of true-to-data uncertainty into simulation traces.
Detecting Work Zones in SHRP 2 NDS Videos Using Deep Learning Based Computer Vision
Nov 10, 2018
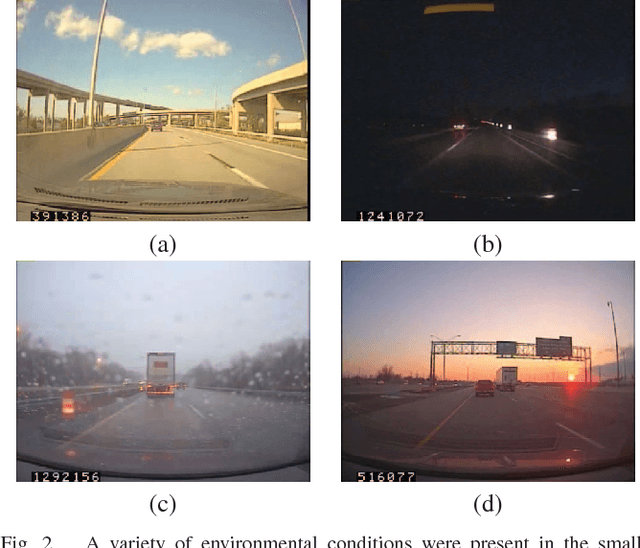


Naturalistic driving studies seek to perform the observations of human driver behavior in the variety of environmental conditions necessary to analyze, understand and predict that behavior using statistical and physical models. The second Strategic Highway Research Program (SHRP 2) funds a number of transportation safety-related projects including its primary effort, the Naturalistic Driving Study (NDS), and an effort supplementary to the NDS, the Roadway Information Database (RID). This work seeks to expand the range of answerable research questions that researchers might pose to the NDS and RID databases. Specifically, we present the SHRP 2 NDS Video Analytics (SNVA) software application, which extracts information from NDS-instrumented vehicles' forward-facing camera footage and efficiently integrates that information into the RID, tying the video content to geolocations and other trip attributes. Of particular interest to researchers and other stakeholders is the integration of work zone, traffic signal state and weather information. The version of SNVA introduced in this paper focuses on work zone detection, the highest priority. The ability to automate the discovery and cataloging of this information, and to do so quickly, is especially important given the two petabyte (2PB) size of the NDS video data set.
Optimal Placement and Patrolling of Autonomous Vehicles in Visibility-Based Robot Networks
Apr 13, 2018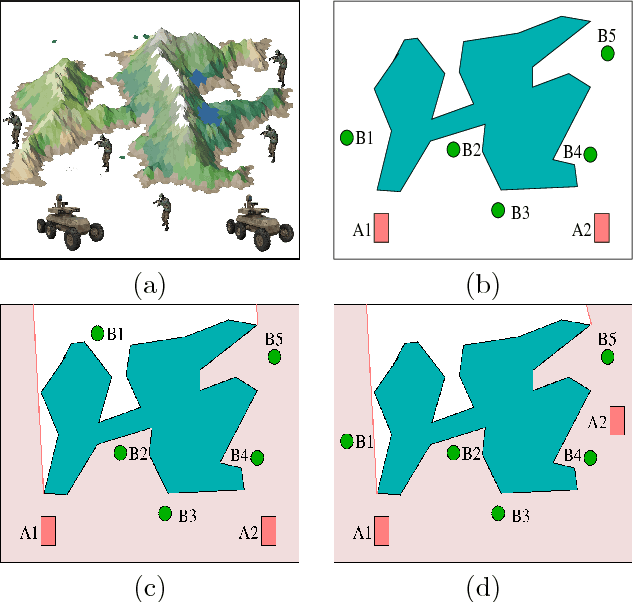
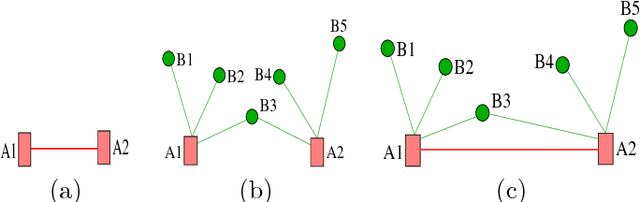
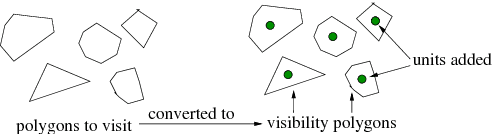
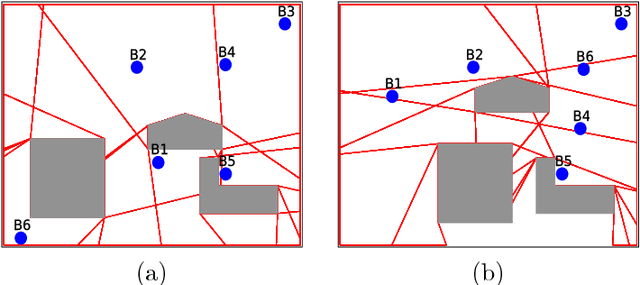
In communication-denied or contested environments, Line-of-Sight (LoS) communication (e.g free space optical communication using infrared or visible light) becomes one of the most reliable and efficient ways to send information between geographically scattered mobile units. In this paper, we consider the problem of planning optimal locations and trajectories for a group of autonomous vehicles to see a set of units that are dispersed in an environment with obstacles. The contributions of the paper are the following: 1) We propose centralized and distributed algorithms to verify that the vehicles and units form a connected network through LoS; 2) We present an algorithm that can maintain visibility-based connectivity, if possible, by relocating a single vehicle; and 3) We study the computational