 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLATUP-Net: A Lightweight 3D Attention U-Net with Parallel Convolutions for Brain Tumor Segmentation
Apr 09, 2024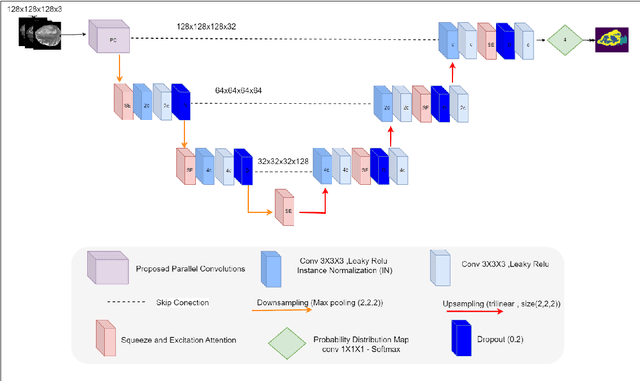
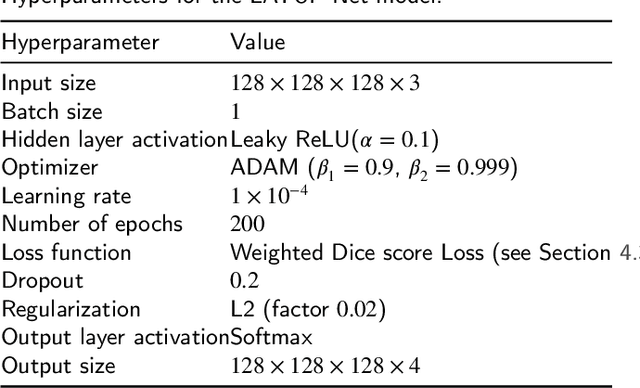
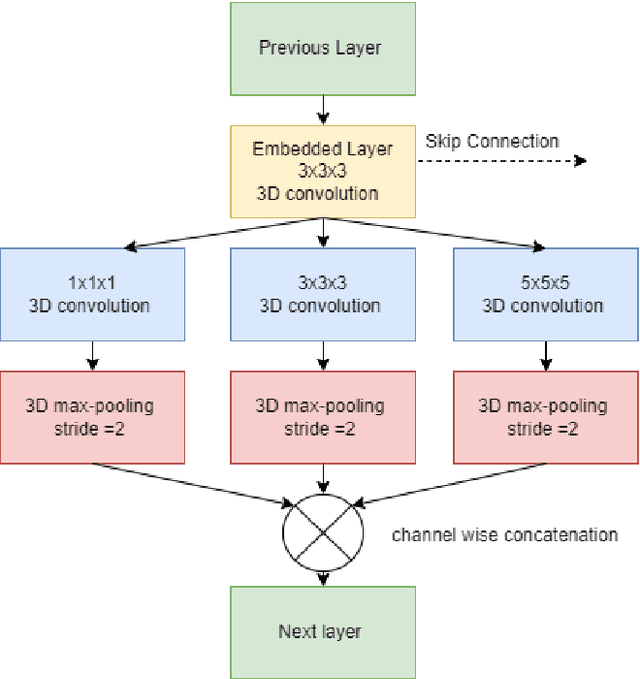

Early-stage 3D brain tumor segmentation from magnetic resonance imaging (MRI) scans is crucial for prompt and effective treatment. However, this process faces the challenge of precise delineation due to the tumors' complex heterogeneity. Moreover, energy sustainability targets and resource limitations, especially in developing countries, require efficient and accessible medical imaging solutions. The proposed architecture, a Lightweight 3D ATtention U-Net with Parallel convolutions, LATUP-Net, addresses these issues. It is specifically designed to reduce computational requirements significantly while maintaining high segmentation performance. By incorporating parallel convolutions, it enhances feature representation by capturing multi-scale information. It further integrates an attention mechanism to refine segmentation through selective feature recalibration. LATUP-Net achieves promising segmentation performance: the average Dice scores for the whole tumor, tumor core, and enhancing tumor on the BraTS2020 dataset are 88.41%, 83.82%, and 73.67%, and on the BraTS2021 dataset, they are 90.29%, 89.54%, and 83.92%, respectively. Hausdorff distance metrics further indicate its improved ability to delineate tumor boundaries. With its significantly reduced computational demand using only 3.07 M parameters, about 59 times fewer than other state-of-the-art models, and running on a single V100 GPU, LATUP-Net stands out as a promising solution for real-world clinical applications, particularly in settings with limited resources. Investigations into the model's interpretability, utilizing gradient-weighted class activation mapping and confusion matrices, reveal that while attention mechanisms enhance the segmentation of small regions, their impact is nuanced. Achieving the most accurate tumor delineation requires carefully balancing local and global features.
Sample-efficient Model-based Reinforcement Learning for Quantum Control
Apr 19, 2023We propose a model-based reinforcement learning (RL) approach for noisy time-dependent gate optimization with improved sample complexity over model-free RL. Sample complexity is the number of controller interactions with the physical system. Leveraging an inductive bias, inspired by recent advances in neural ordinary differential equations (ODEs), we use an auto-differentiable ODE parametrised by a learnable Hamiltonian ansatz to represent the model approximating the environment whose time-dependent part, including the control, is fully known. Control alongside Hamiltonian learning of continuous time-independent parameters is addressed through interactions with the system. We demonstrate an order of magnitude advantage in the sample complexity of our method over standard model-free RL in preparing some standard unitary gates with closed and open system dynamics, in realistic numerical experiments incorporating single shot measurements, arbitrary Hilbert space truncations and uncertainty in Hamiltonian parameters. Also, the learned Hamiltonian can be leveraged by existing control methods like GRAPE for further gradient-based optimization with the controllers found by RL as initializations. Our algorithm that we apply on nitrogen vacancy (NV) centers and transmons in this paper is well suited for controlling partially characterised one and two qubit systems.