 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Minimal Search Space for Conditional Causal Bandits
Feb 10, 2025Causal knowledge can be used to support decision-making problems. This has been recognized in the causal bandits literature, where a causal (multi-armed) bandit is characterized by a causal graphical model and a target variable. The arms are then interventions on the causal model, and rewards are samples of the target variable. Causal bandits were originally studied with a focus on hard interventions. We focus instead on cases where the arms are conditional interventions, which more accurately model many real-world decision-making problems by allowing the value of the intervened variable to be chosen based on the observed values of other variables. This paper presents a graphical characterization of the minimal set of nodes guaranteed to contain the optimal conditional intervention, which maximizes the expected reward. We then propose an efficient algorithm with a time complexity of $O(|V| + |E|)$ to identify this minimal set of nodes. We prove that the graphical characterization and the proposed algorithm are correct. Finally, we empirically demonstrate that our algorithm significantly prunes the search space and substantially accelerates convergence rates when integrated into standard multi-armed bandit algorithms.
Optimal Causal Representations and the Causal Information Bottleneck
Oct 02, 2024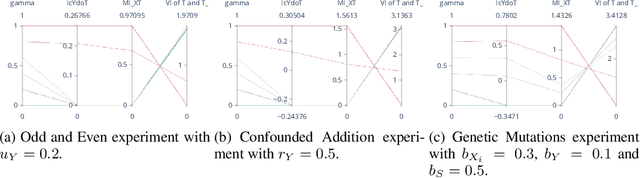



To effectively study complex causal systems, it is often useful to construct representations that simplify parts of the system by discarding irrelevant details while preserving key features. The Information Bottleneck (IB) method is a widely used approach in representation learning that compresses random variables while retaining information about a target variable. Traditional methods like IB are purely statistical and ignore underlying causal structures, making them ill-suited for causal tasks. We propose the Causal Information Bottleneck (CIB), a causal extension of the IB, which compresses a set of chosen variables while maintaining causal control over a target variable. This method produces representations which are causally interpretable, and which can be used when reasoning about interventions. We present experimental results demonstrating that the learned representations accurately capture causality as intended.
Fundamental Properties of Causal Entropy and Information Gain
Feb 02, 2024
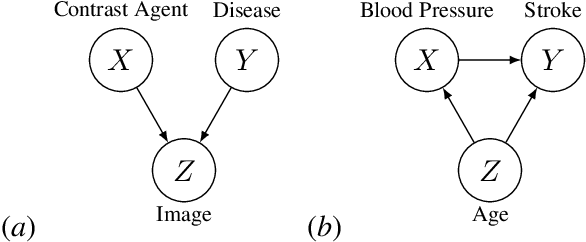
Recent developments enable the quantification of causal control given a structural causal model (SCM). This has been accomplished by introducing quantities which encode changes in the entropy of one variable when intervening on another. These measures, named causal entropy and causal information gain, aim to address limitations in existing information theoretical approaches for machine learning tasks where causality plays a crucial role. They have not yet been properly mathematically studied. Our research contributes to the formal understanding of the notions of causal entropy and causal information gain by establishing and analyzing fundamental properties of these concepts, including bounds and chain rules. Furthermore, we elucidate the relationship between causal entropy and stochastic interventions. We also propose definitions for causal conditional entropy and causal conditional information gain. Overall, this exploration paves the way for enhancing causal machine learning tasks through the study of recently-proposed information theoretic quantities grounded in considerations about causality.