 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTaming Lagrangian Chaos with Multi-Objective Reinforcement Learning
Dec 19, 2022We consider the problem of two active particles in 2D complex flows with the multi-objective goals of minimizing both the dispersion rate and the energy consumption of the pair. We approach the problem by means of Multi Objective Reinforcement Learning (MORL), combining scalarization techniques together with a Q-learning algorithm, for Lagrangian drifters that have variable swimming velocity. We show that MORL is able to find a set of trade-off solutions forming an optimal Pareto frontier. As a benchmark, we show that a set of heuristic strategies are dominated by the MORL solutions. We consider the situation in which the agents cannot update their control variables continuously, but only after a discrete (decision) time, $\tau$. We show that there is a range of decision times, in between the Lyapunov time and the continuous updating limit, where Reinforcement Learning finds strategies that significantly improve over heuristics. In particular, we discuss how large decision times require enhanced knowledge of the flow, whereas for smaller $\tau$ all a priori heuristic strategies become Pareto optimal.
Reinforcement learning for pursuit and evasion of microswimmers at low Reynolds number
Jun 16, 2021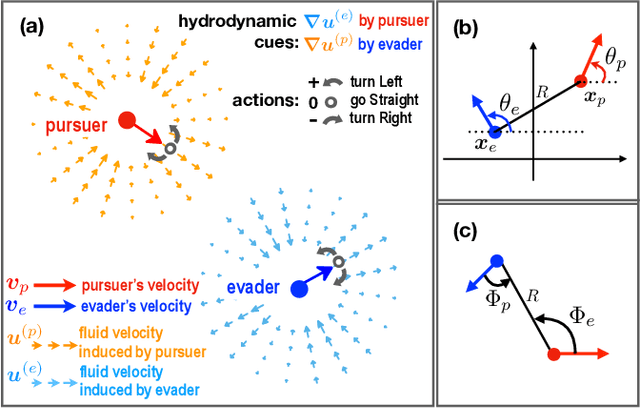
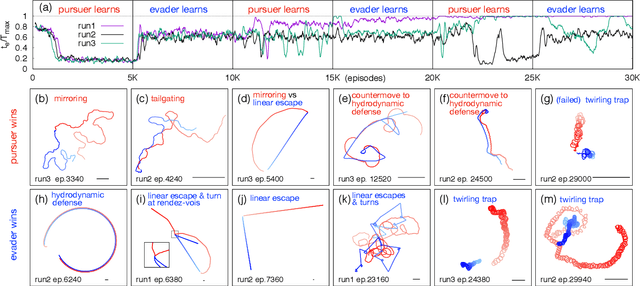
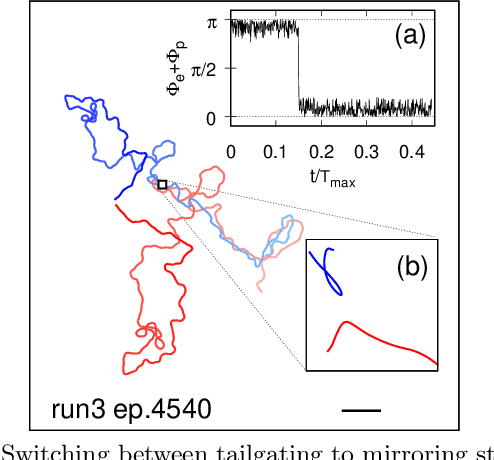
Aquatic organisms can use hydrodynamic cues to navigate, find their preys and escape from predators. We consider a model of two competing microswimmers engaged in a pursue-evasion task while immersed in a low-Reynolds-number environment. The players have limited abilities: they can only sense hydrodynamic disturbances, which provide some cue about the opponent's position, and perform simple manoeuvres. The goal of the pursuer is to capturethe evader in the shortest possible time. Conversely the evader aims at deferring capture as much as possible. We show that by means of Reinforcement Learning the players find efficient and physically explainable strategies which non-trivially exploit the hydrodynamic environment. This Letter offers a proof-of-concept for the use of Reinforcement Learning to discover prey-predator strategies in aquatic environments, with potential applications to underwater robotics.
Using machine-learning modelling to understand macroscopic dynamics in a system of coupled maps
Nov 08, 2020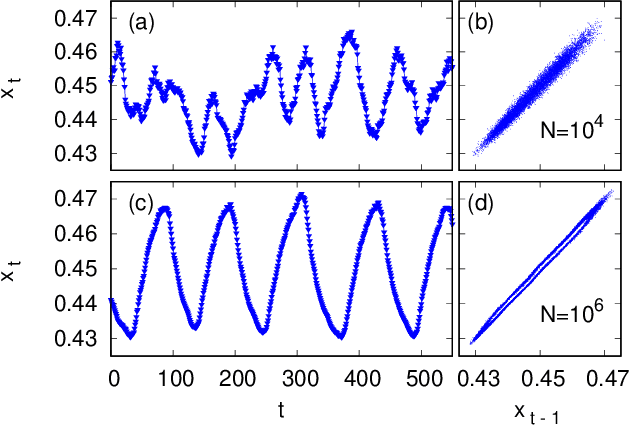
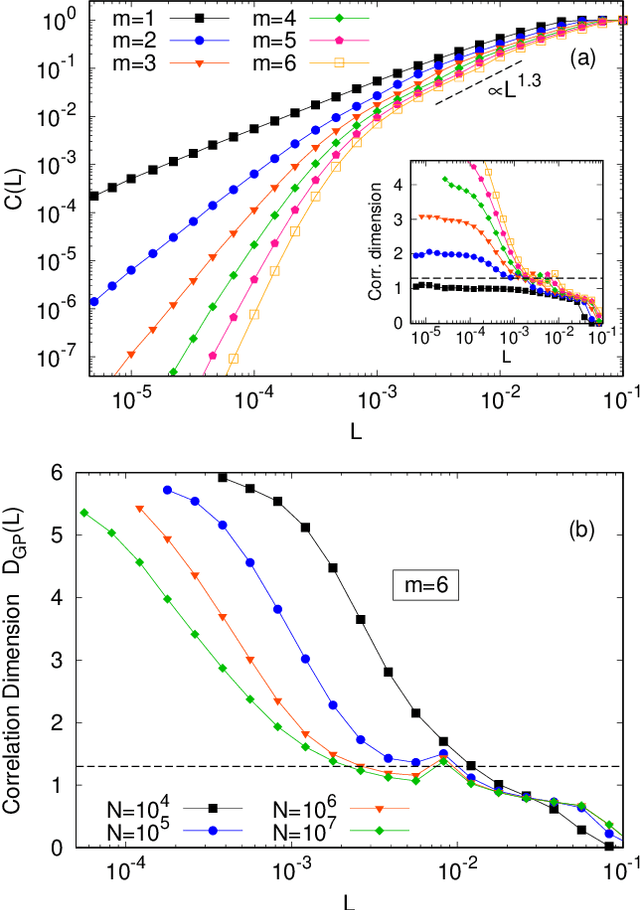
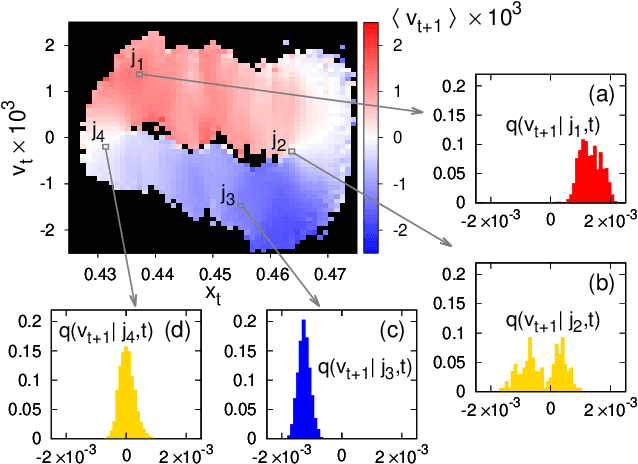
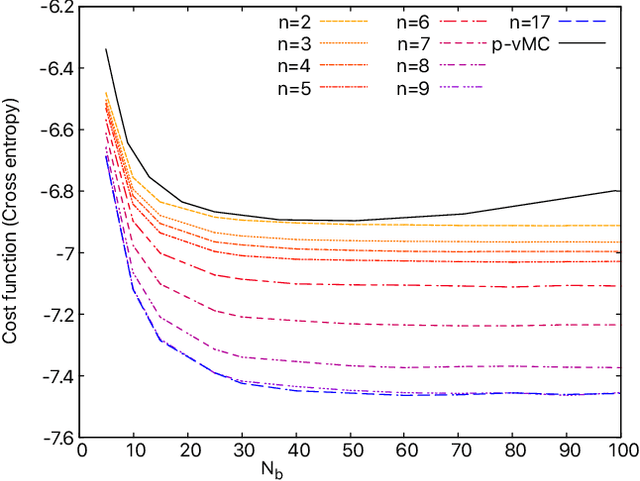
Machine learning techniques not only offer efficient tools for modelling dynamical systems from data, but can also be employed as frontline investigative instruments for the underlying physics. Nontrivial information about the original dynamics, which would otherwise require sophisticated ad-hoc techniques, can be obtained by a careful usage of such methods. To illustrate this point, we consider as a case study the macroscopic motion emerging from a system of globally coupled maps. We build a coarse-grained Markov process for the macroscopic dynamics both with a machine learning approach and with a direct numerical computation of the transition probability of the coarse-grained process, and we compare the outcomes of the two analyses. Our purpose is twofold: on the one hand, we want to test the ability of the stochastic machine learning approach to describe nontrivial evolution laws, as the one considered in our study; on the other hand, we aim at gaining some insight into the physics of the macroscopic dynamics by modulating the information available to the network, we are able to infer important information about the effective dimension of the attractor, the persistence of memory effects and the multi-scale structure of the dynamics.
Effective models and predictability of chaotic multiscale systems via machine learning
Jul 02, 2020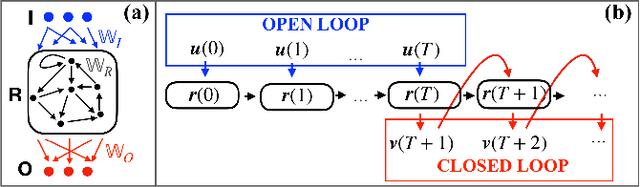
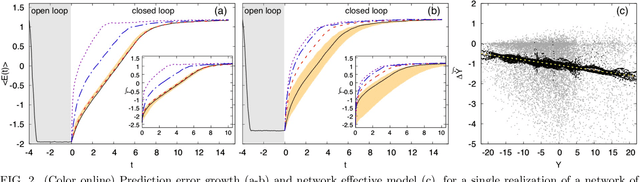
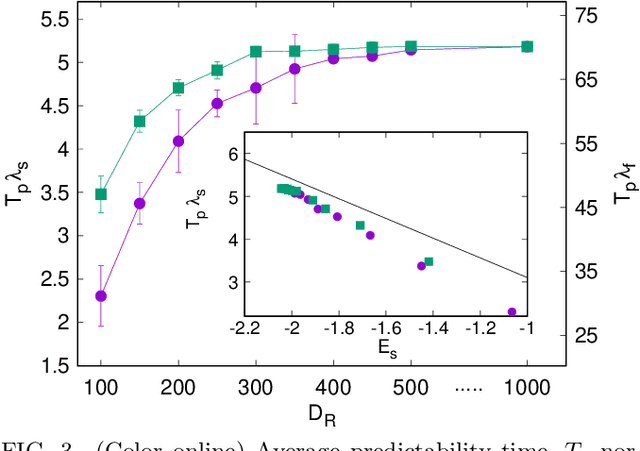
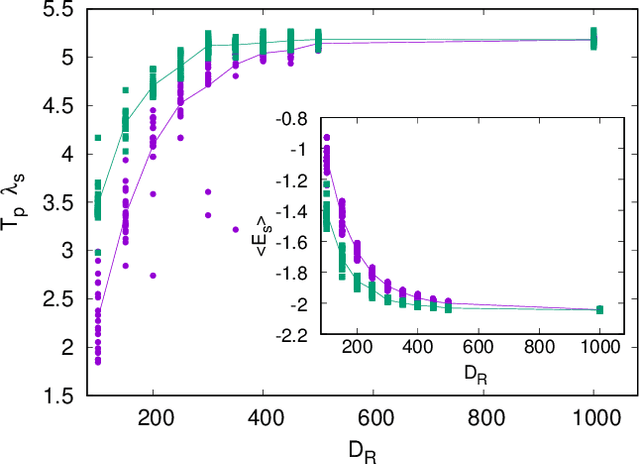
We scrutinize the use of machine learning, based on reservoir computing, to build data-driven effective models of multiscale chaotic systems. We show that, for a wide scale separation, machine learning generates effective models akin to those obtained using multiscale asymptotic techniques and, remarkably, remains effective in predictability also when the scale separation is reduced. We also show that predictability can be improved by hybridizing the reservoir with an imperfect model.