 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Decomposition and Recognition of Long and Complex Manipulation Action Sequences
Oct 18, 2016



Understanding continuous human actions is a non-trivial but important problem in computer vision. Although there exists a large corpus of work in the recognition of action sequences, most approaches suffer from problems relating to vast variations in motions, action combinations, and scene contexts. In this paper, we introduce a novel method for semantic segmentation and recognition of long and complex manipulation action tasks, such as "preparing a breakfast" or "making a sandwich". We represent manipulations with our recently introduced "Semantic Event Chain" (SEC) concept, which captures the underlying spatiotemporal structure of an action invariant to motion, velocity, and scene context. Solely based on the spatiotemporal interactions between manipulated objects and hands in the extracted SEC, the framework automatically parses individual manipulation streams performed either sequentially or concurrently. Using event chains, our method further extracts basic primitive elements of each parsed manipulation. Without requiring any prior object knowledge, the proposed framework can also extract object-like scene entities that exhibit the same role in semantically similar manipulations. We conduct extensive experiments on various recent datasets to validate the robustness of the framework.
* IJCV preprint manuscript
Self-organized adaptation of a simple neural circuit enables complex robot behaviour
May 06, 2011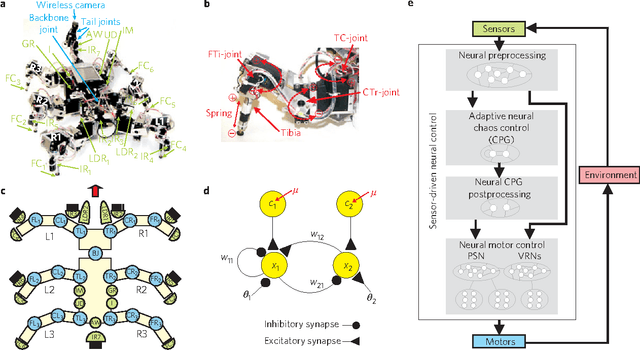
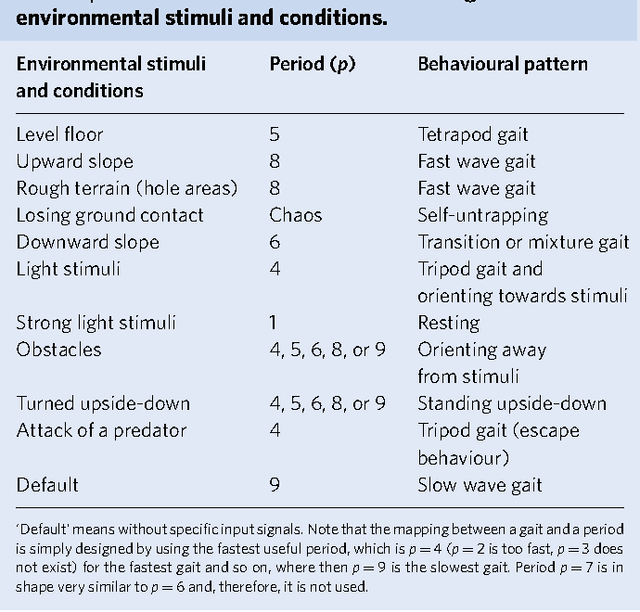


Controlling sensori-motor systems in higher animals or complex robots is a challenging combinatorial problem, because many sensory signals need to be simultaneously coordinated into a broad behavioural spectrum. To rapidly interact with the environment, this control needs to be fast and adaptive. Current robotic solutions operate with limited autonomy and are mostly restricted to few behavioural patterns. Here we introduce chaos control as a new strategy to generate complex behaviour of an autonomous robot. In the presented system, 18 sensors drive 18 motors via a simple neural control circuit, thereby generating 11 basic behavioural patterns (e.g., orienting, taxis, self-protection, various gaits) and their combinations. The control signal quickly and reversibly adapts to new situations and additionally enables learning and synaptic long-term storage of behaviourally useful motor responses. Thus, such neural control provides a powerful yet simple way to self-organize versatile behaviours in autonomous agents with many degrees of freedom.
* 16 pages, non-final version, for final see Nature Physics homepage