 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEquivariant Flow Matching for Symmetry-Breaking Bifurcation Problems
Sep 03, 2025Bifurcation phenomena in nonlinear dynamical systems often lead to multiple coexisting stable solutions, particularly in the presence of symmetry breaking. Deterministic machine learning models struggle to capture this multiplicity, averaging over solutions and failing to represent lower-symmetry outcomes. In this work, we propose a generative framework based on flow matching to model the full probability distribution over bifurcation outcomes. Our method enables direct sampling of multiple valid solutions while preserving system symmetries through equivariant modeling. We introduce a symmetric matching strategy that aligns predicted and target outputs under group actions, allowing accurate learning in equivariant settings. We validate our approach on a range of systems, from toy models to complex physical problems such as buckling beams and the Allen-Cahn equation. Our results demonstrate that flow matching significantly outperforms non-probabilistic and variational methods in capturing multimodal distributions and symmetry-breaking bifurcations, offering a principled and scalable solution for modeling multistability in high-dimensional systems.
Understanding complex crowd dynamics with generative neural simulators
Dec 03, 2024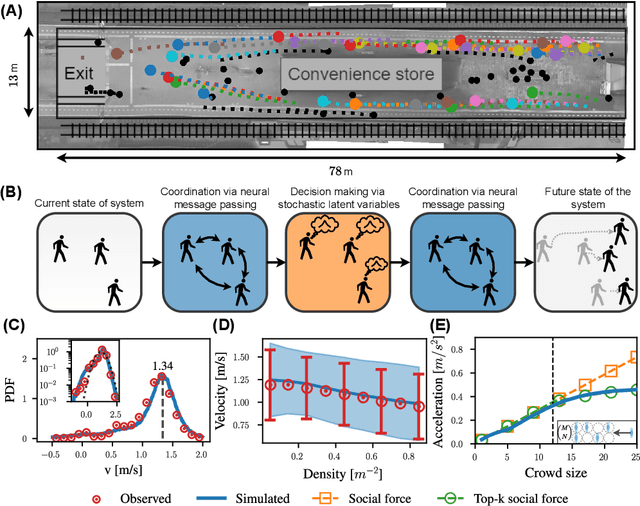
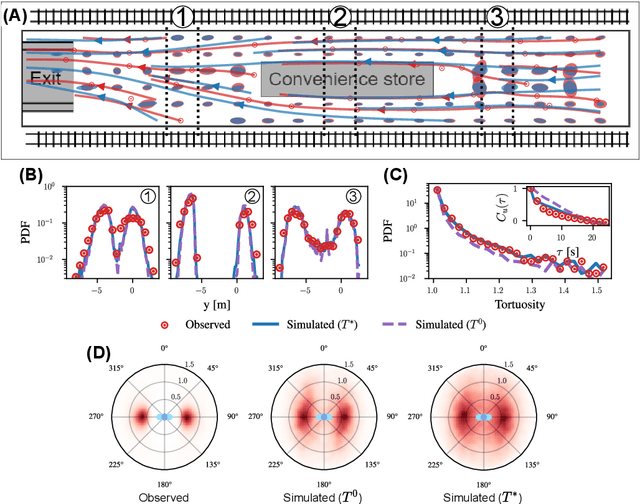
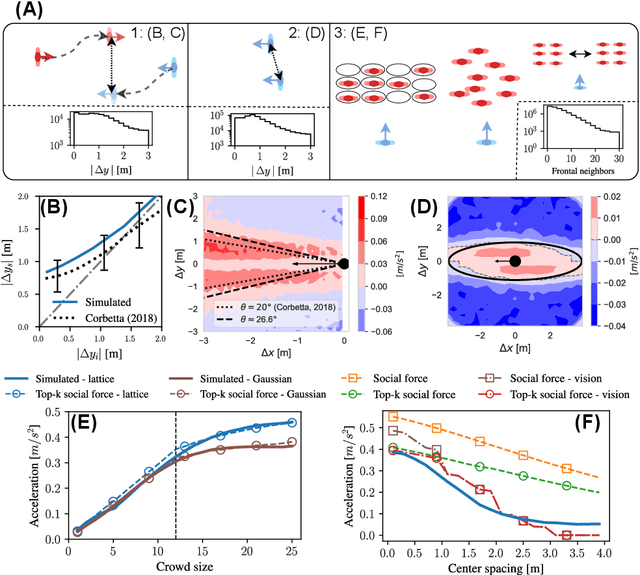
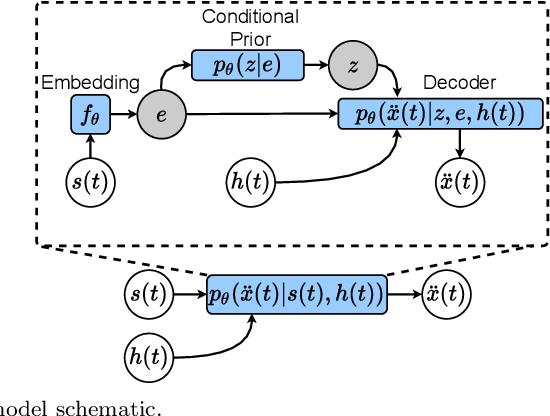
Understanding the dynamics of pedestrian crowds is an outstanding challenge crucial for designing efficient urban infrastructure and ensuring safe crowd management. To this end, both small-scale laboratory and large-scale real-world measurements have been used. However, these approaches respectively lack statistical resolution and parametric controllability, both essential to discovering physical relationships underlying the complex stochastic dynamics of crowds. Here, we establish an investigation paradigm that offers laboratory-like controllability, while ensuring the statistical resolution of large-scale real-world datasets. Using our data-driven Neural Crowd Simulator (NeCS), which we train on large-scale data and validate against key statistical features of crowd dynamics, we show that we can perform effective surrogate crowd dynamics experiments without training on specific scenarios. We not only reproduce known experimental results on pairwise avoidance, but also uncover the vision-guided and topological nature of N-body interactions. These findings show how virtual experiments based on neural simulation enable data-driven scientific discovery.
Similarity Equivariant Graph Neural Networks for Homogenization of Metamaterials
Apr 26, 2024



Soft, porous mechanical metamaterials exhibit pattern transformations that may have important applications in soft robotics, sound reduction and biomedicine. To design these innovative materials, it is important to be able to simulate them accurately and quickly, in order to tune their mechanical properties. Since conventional simulations using the finite element method entail a high computational cost, in this article we aim to develop a machine learning-based approach that scales favorably to serve as a surrogate model. To ensure that the model is also able to handle various microstructures, including those not encountered during training, we include the microstructure as part of the network input. Therefore, we introduce a graph neural network that predicts global quantities (energy, stress stiffness) as well as the pattern transformations that occur (the kinematics). To make our model as accurate and data-efficient as possible, various symmetries are incorporated into the model. The starting point is an E(n)-equivariant graph neural network (which respects translation, rotation and reflection) that has periodic boundary conditions (i.e., it is in-/equivariant with respect to the choice of RVE), is scale in-/equivariant, can simulate large deformations, and can predict scalars, vectors as well as second and fourth order tensors (specifically energy, stress and stiffness). The incorporation of scale equivariance makes the model equivariant with respect to the similarities group, of which the Euclidean group E(n) is a subgroup. We show that this network is more accurate and data-efficient than graph neural networks with fewer symmetries. To create an efficient graph representation of the finite element discretization, we use only the internal geometrical hole boundaries from the finite element mesh to achieve a better speed-up and scaling with the mesh size.