 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReward Compatibility: A Framework for Inverse RL
Jan 14, 2025



We provide an original theoretical study of Inverse Reinforcement Learning (IRL) through the lens of reward compatibility, a novel framework to quantify the compatibility of a reward with the given expert's demonstrations. Intuitively, a reward is more compatible with the demonstrations the closer the performance of the expert's policy computed with that reward is to the optimal performance for that reward. This generalizes the notion of feasible reward set, the most common framework in the theoretical IRL literature, for which a reward is either compatible or not compatible. The grayscale introduced by the reward compatibility is the key to extend the realm of provably efficient IRL far beyond what is attainable with the feasible reward set: from tabular to large-scale MDPs. We analyze the IRL problem across various settings, including optimal and suboptimal expert's demonstrations and both online and offline data collection. For all of these dimensions, we provide a tractable algorithm and corresponding sample complexity analysis, as well as various insights on reward compatibility and how the framework can pave the way to yet more general problem settings.
On the Partial Identifiability in Reward Learning: Choosing the Best Reward
Jan 10, 2025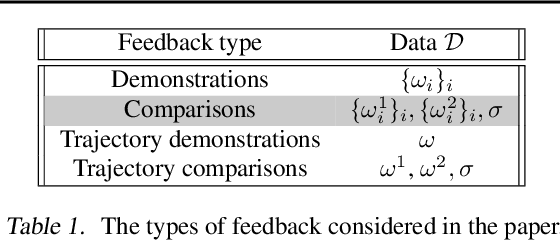



In Reward Learning (ReL), we are given feedback on an unknown *target reward*, and the goal is to use this information to find it. When the feedback is not informative enough, the target reward is only *partially identifiable*, i.e., there exists a set of rewards (the feasible set) that are equally-compatible with the feedback. In this paper, we show that there exists a choice of reward, non-necessarily contained in the feasible set that, *depending on the ReL application*, improves the performance w.r.t. selecting the reward arbitrarily among the feasible ones. To this aim, we introduce a new *quantitative framework* to analyze ReL problems in a simple yet expressive way. We exemplify the framework in a *reward transfer* use case, for which we devise three provably-efficient ReL algorithms.
Learning Utilities from Demonstrations in Markov Decision Processes
Sep 25, 2024Our goal is to extract useful knowledge from demonstrations of behavior in sequential decision-making problems. Although it is well-known that humans commonly engage in risk-sensitive behaviors in the presence of stochasticity, most Inverse Reinforcement Learning (IRL) models assume a risk-neutral agent. Beyond introducing model misspecification, these models do not directly capture the risk attitude of the observed agent, which can be crucial in many applications. In this paper, we propose a novel model of behavior in Markov Decision Processes (MDPs) that explicitly represents the agent's risk attitude through a utility function. We then define the Utility Learning (UL) problem as the task of inferring the observed agent's risk attitude, encoded via a utility function, from demonstrations in MDPs, and we analyze the partial identifiability of the agent's utility. Furthermore, we devise two provably efficient algorithms for UL in a finite-data regime, and we analyze their sample complexity. We conclude with proof-of-concept experiments that empirically validate both our model and our algorithms.
How to Scale Inverse RL to Large State Spaces? A Provably Efficient Approach
Jun 06, 2024



In online Inverse Reinforcement Learning (IRL), the learner can collect samples about the dynamics of the environment to improve its estimate of the reward function. Since IRL suffers from identifiability issues, many theoretical works on online IRL focus on estimating the entire set of rewards that explain the demonstrations, named the feasible reward set. However, none of the algorithms available in the literature can scale to problems with large state spaces. In this paper, we focus on the online IRL problem in Linear Markov Decision Processes (MDPs). We show that the structure offered by Linear MDPs is not sufficient for efficiently estimating the feasible set when the state space is large. As a consequence, we introduce the novel framework of rewards compatibility, which generalizes the notion of feasible set, and we develop CATY-IRL, a sample efficient algorithm whose complexity is independent of the cardinality of the state space in Linear MDPs. When restricted to the tabular setting, we demonstrate that CATY-IRL is minimax optimal up to logarithmic factors. As a by-product, we show that Reward-Free Exploration (RFE) enjoys the same worst-case rate, improving over the state-of-the-art lower bound. Finally, we devise a unifying framework for IRL and RFE that may be of independent interest.
Offline Inverse RL: New Solution Concepts and Provably Efficient Algorithms
Feb 23, 2024

Inverse reinforcement learning (IRL) aims to recover the reward function of an expert agent from demonstrations of behavior. It is well known that the IRL problem is fundamentally ill-posed, i.e., many reward functions can explain the demonstrations. For this reason, IRL has been recently reframed in terms of estimating the feasible reward set, thus, postponing the selection of a single reward. However, so far, the available formulations and algorithmic solutions have been proposed and analyzed mainly for the online setting, where the learner can interact with the environment and query the expert at will. This is clearly unrealistic in most practical applications, where the availability of an offline dataset is a much more common scenario. In this paper, we introduce a novel notion of feasible reward set capturing the opportunities and limitations of the offline setting and we analyze the complexity of its estimation. This requires the introduction an original learning framework that copes with the intrinsic difficulty of the setting, for which the data coverage is not under control. Then, we propose two computationally and statistically efficient algorithms, IRLO and PIRLO, for addressing the problem. In particular, the latter adopts a specific form of pessimism to enforce the novel desirable property of inclusion monotonicity of the delivered feasible set. With this work, we aim to provide a panorama of the challenges of the offline IRL problem and how they can be fruitfully addressed.
Towards Theoretical Understanding of Inverse Reinforcement Learning
Apr 25, 2023


Inverse reinforcement learning (IRL) denotes a powerful family of algorithms for recovering a reward function justifying the behavior demonstrated by an expert agent. A well-known limitation of IRL is the ambiguity in the choice of the reward function, due to the existence of multiple rewards that explain the observed behavior. This limitation has been recently circumvented by formulating IRL as the problem of estimating the feasible reward set, i.e., the region of the rewards compatible with the expert's behavior. In this paper, we make a step towards closing the theory gap of IRL in the case of finite-horizon problems with a generative model. We start by formally introducing the problem of estimating the feasible reward set, the corresponding PAC requirement, and discussing the properties of particular classes of rewards. Then, we provide the first minimax lower bound on the sample complexity for the problem of estimating the feasible reward set of order ${\Omega}\Bigl( \frac{H^3SA}{\epsilon^2} \bigl( \log \bigl(\frac{1}{\delta}\bigl) + S \bigl)\Bigl)$, being $S$ and $A$ the number of states and actions respectively, $H$ the horizon, $\epsilon$ the desired accuracy, and $\delta$ the confidence. We analyze the sample complexity of a uniform sampling strategy (US-IRL), proving a matching upper bound up to logarithmic factors. Finally, we outline several open questions in IRL and propose future research directions.