 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Metric Relocalization Using Transform Consistency Loss
Nov 01, 2020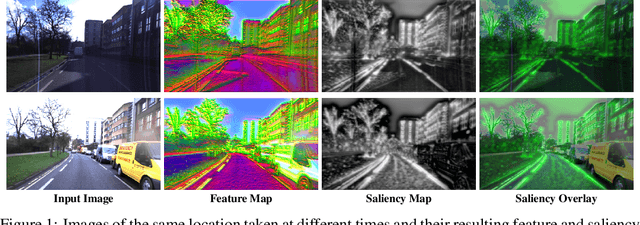
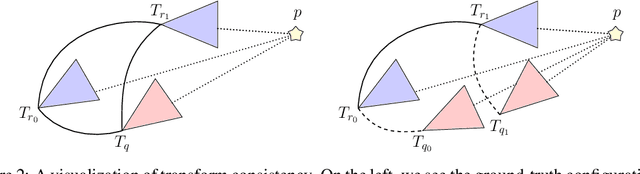
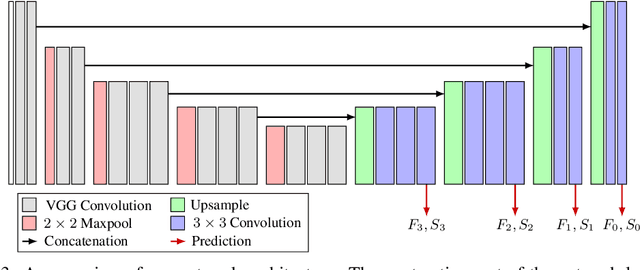
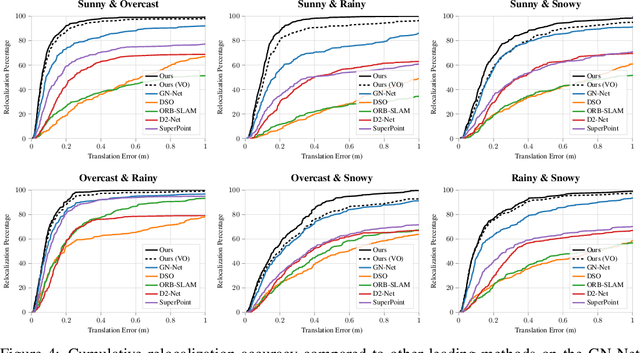
Training networks to perform metric relocalization traditionally requires accurate image correspondences. In practice, these are obtained by restricting domain coverage, employing additional sensors, or capturing large multi-view datasets. We instead propose a self-supervised solution, which exploits a key insight: localizing a query image within a map should yield the same absolute pose, regardless of the reference image used for registration. Guided by this intuition, we derive a novel transform consistency loss. Using this loss function, we train a deep neural network to infer dense feature and saliency maps to perform robust metric relocalization in dynamic environments. We evaluate our framework on synthetic and real-world data, showing our approach outperforms other supervised methods when a limited amount of ground-truth information is available.
FastCal: Robust Online Self-Calibration for Robotic Systems
Feb 27, 2019
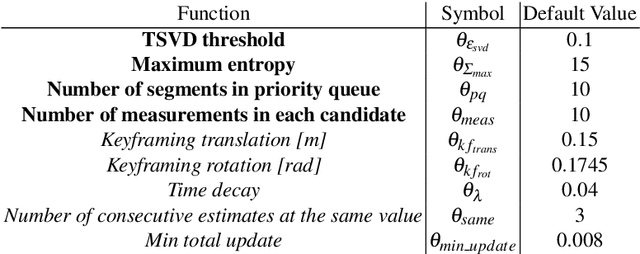
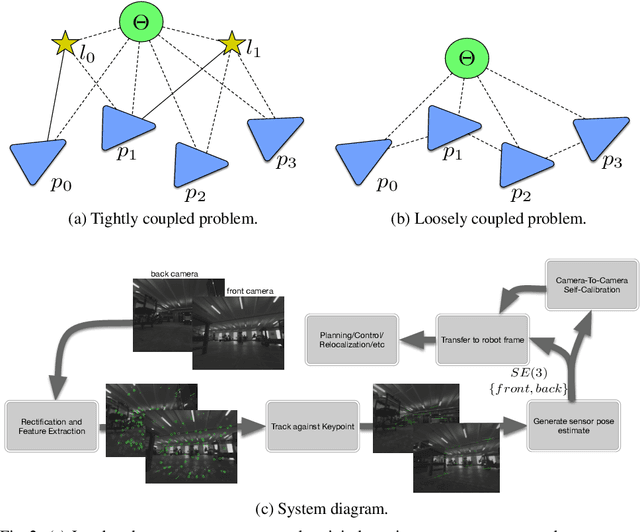
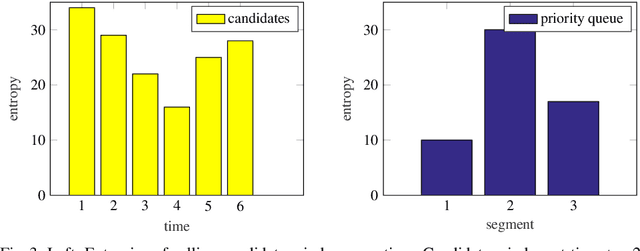
We propose a solution for sensor extrinsic self-calibration with very low time complexity, competitive accuracy and graceful handling of often-avoided corner cases: drift in calibration parameters and unobservable directions in the parameter space. It consists of three main parts: 1) information-theoretic based segment selection for constant-time estimation; 2) observability-aware parameter update through a rank-revealing decomposition of the Fisher information matrix; 3) drift-correcting self-calibration through the time-decay of segments. At the core of our FastCal algorithm is the loosely-coupled formulation for sensor extrinsics calibration and efficient selection of measurements. FastCal runs up to an order of magnitude faster than similar self-calibration algorithms (camera-to-camera extrinsics, excluding feature-matching and image pre-processing on all comparisons), making FastCal ideal for integration into existing, resource-constrained, robotics systems.