 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Metric Relocalization Using Transform Consistency Loss
Paper and Code
Nov 01, 2020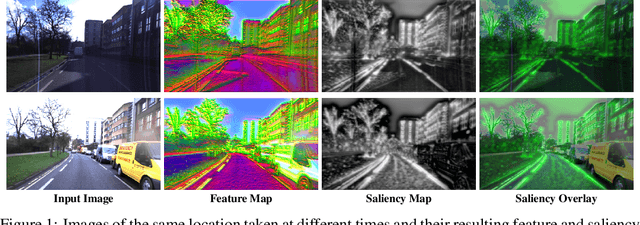
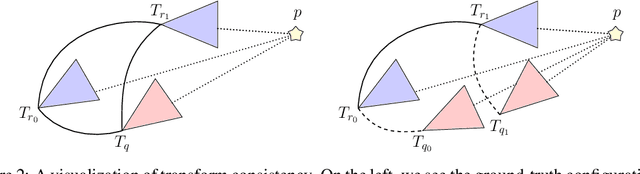
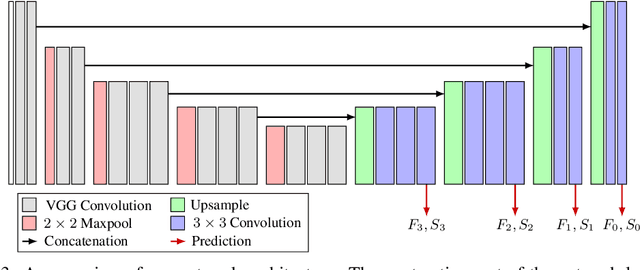
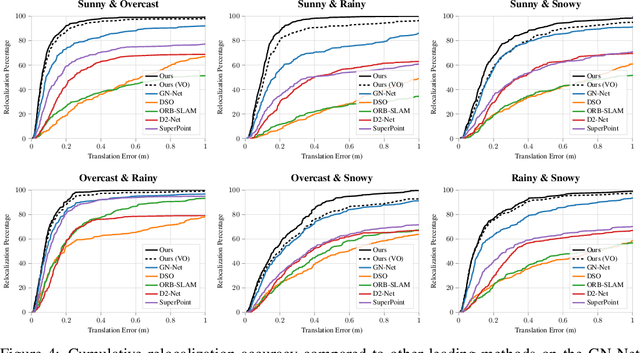
Training networks to perform metric relocalization traditionally requires accurate image correspondences. In practice, these are obtained by restricting domain coverage, employing additional sensors, or capturing large multi-view datasets. We instead propose a self-supervised solution, which exploits a key insight: localizing a query image within a map should yield the same absolute pose, regardless of the reference image used for registration. Guided by this intuition, we derive a novel transform consistency loss. Using this loss function, we train a deep neural network to infer dense feature and saliency maps to perform robust metric relocalization in dynamic environments. We evaluate our framework on synthetic and real-world data, showing our approach outperforms other supervised methods when a limited amount of ground-truth information is available.