 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiveTradeBench: Seeking Real-World Alpha with Large Language Models
Nov 05, 2025Large language models (LLMs) achieve strong performance across benchmarks--from knowledge quizzes and math reasoning to web-agent tasks--but these tests occur in static settings, lacking real dynamics and uncertainty. Consequently, they evaluate isolated reasoning or problem-solving rather than decision-making under uncertainty. To address this, we introduce LiveTradeBench, a live trading environment for evaluating LLM agents in realistic and evolving markets. LiveTradeBench follows three design principles: (i) Live data streaming of market prices and news, eliminating dependence on offline backtesting and preventing information leakage while capturing real-time uncertainty; (ii) a portfolio-management abstraction that extends control from single-asset actions to multi-asset allocation, integrating risk management and cross-asset reasoning; and (iii) multi-market evaluation across structurally distinct environments--U.S. stocks and Polymarket prediction markets--differing in volatility, liquidity, and information flow. At each step, an agent observes prices, news, and its portfolio, then outputs percentage allocations that balance risk and return. Using LiveTradeBench, we run 50-day live evaluations of 21 LLMs across families. Results show that (1) high LMArena scores do not imply superior trading outcomes; (2) models display distinct portfolio styles reflecting risk appetite and reasoning dynamics; and (3) some LLMs effectively leverage live signals to adapt decisions. These findings expose a gap between static evaluation and real-world competence, motivating benchmarks that test sequential decision making and consistency under live uncertainty.
Ray3D: ray-based 3D human pose estimation for monocular absolute 3D localization
Mar 30, 2022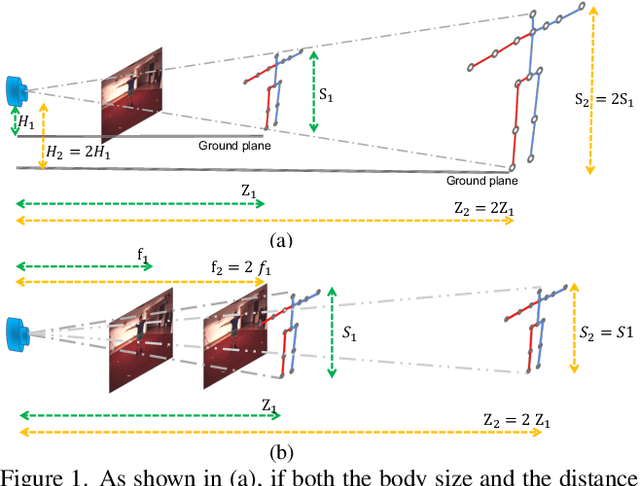

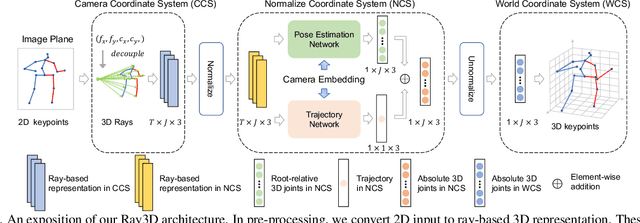

In this paper, we propose a novel monocular ray-based 3D (Ray3D) absolute human pose estimation with calibrated camera. Accurate and generalizable absolute 3D human pose estimation from monocular 2D pose input is an ill-posed problem. To address this challenge, we convert the input from pixel space to 3D normalized rays. This conversion makes our approach robust to camera intrinsic parameter changes. To deal with the in-the-wild camera extrinsic parameter variations, Ray3D explicitly takes the camera extrinsic parameters as an input and jointly models the distribution between the 3D pose rays and camera extrinsic parameters. This novel network design is the key to the outstanding generalizability of Ray3D approach. To have a comprehensive understanding of how the camera intrinsic and extrinsic parameter variations affect the accuracy of absolute 3D key-point localization, we conduct in-depth systematic experiments on three single person 3D benchmarks as well as one synthetic benchmark. These experiments demonstrate that our method significantly outperforms existing state-of-the-art models. Our code and the synthetic dataset are available at https://github.com/YxZhxn/Ray3D .