 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy Tank-based Control Framework for Satisfying the ISO/TS 15066 Constraint
Apr 27, 2023



The technical specification ISO/TS 15066 provides the foundational elements for assessing the safety of collaborative human-robot cells, which are the cornerstone of the modern industrial paradigm. The standard implementation of the ISO/TS 15066 procedure, however, often results in conservative motions of the robot, with consequently low performance of the cell. In this paper, we propose an energy tank-based approach that allows to directly satisfy the energetic bounds imposed by the ISO/TS 15066, thus avoiding the introduction of conservative modeling and assumptions. The proposed approach has been successfully validated in simulation.
A Null-space based Approach for a Safe and Effective Human-Robot Collaboration
Nov 24, 2022



During physical human robot collaboration, it is important to be able to implement a time-varying interactive behaviour while ensuring robust stability. Admittance control and passivity theory can be exploited for achieving these objectives. Nevertheless, when the admittance dynamics is time-varying, it can happen that, for ensuring a passive and stable behaviour, some spurious dissipative effects have to be introduced in the admittance dynamics. These effects are perceived by the user and degrade the collaborative performance. In this paper we exploit the task redundancy of the manipulator in order to harvest energy in the null space and to avoid spurious dynamics on the admittance. The proposed architecture is validated by simulations and by experiments onto a collaborative robot.
Whole-Body Control of a Mobile Manipulator for Passive Collaborative Transportation
Nov 24, 2022Human-robot collaborative tasks foresee interactions between humans and robots with various degrees of complexity. Specifically, for tasks which involve physical contact among the agents, challenges arise in the modelling and control of such interaction. In this paper we propose a control architecture capable of ensuring a flexible and robustly stable physical human-robot interaction, focusing on a collaborative transportation task. The architecture is deployed onto a mobile manipulator, modelled as a whole-body structure, which aids the operator during the transportation of an unwieldy load. Thanks to passivity techniques, the controller adapts its interaction parameters online while preserving robust stability for the overall system, thus experimentally validating the architecture.
Bidirectional Communication Control for Human-Robot Collaboration
Jun 10, 2022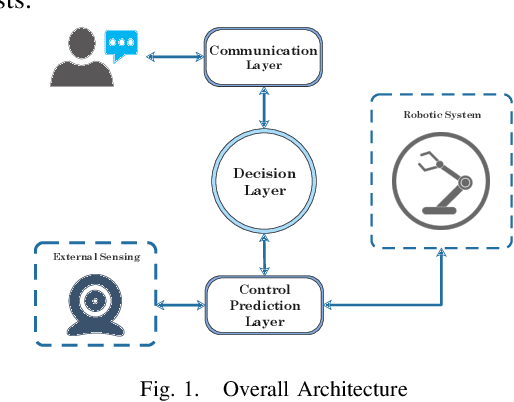
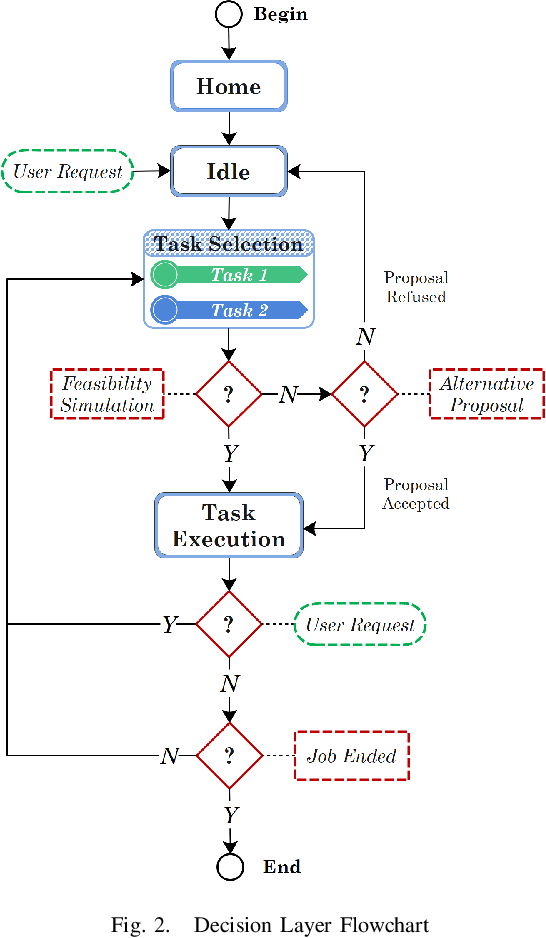
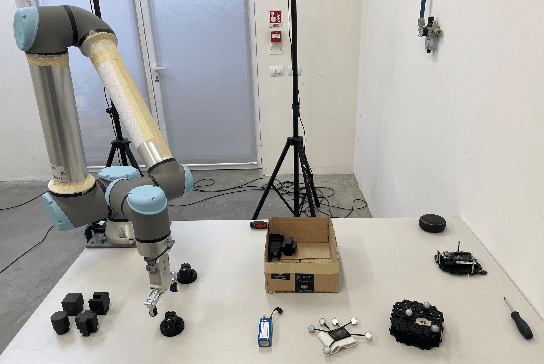

A fruitful collaboration is based on the mutual knowledge of each other skills and on the possibility of communicating their own limits and proposing alternatives to adapt the execution of a task to the capabilities of the collaborators. This paper aims at reproducing such a scenario in a human-robot collaboration setting by proposing a novel communication control architecture. Exploiting control barrier functions, the robot is made aware of its (dynamic) skills and limits and, thanks to a local predictor, it is able to assess if it is possible to execute a requested task and, if not, to propose alternative by relaxing some constraints. The controller is interfaced with a communication infrastructure that enables human and robot to set up a bidirectional communication about the task to execute and the human to take an informed decision on the behavior of the robot. A comparative experimental validation is proposed.
An Optimization Approach for a Robust and Flexible Control in Collaborative Applications
Mar 04, 2021
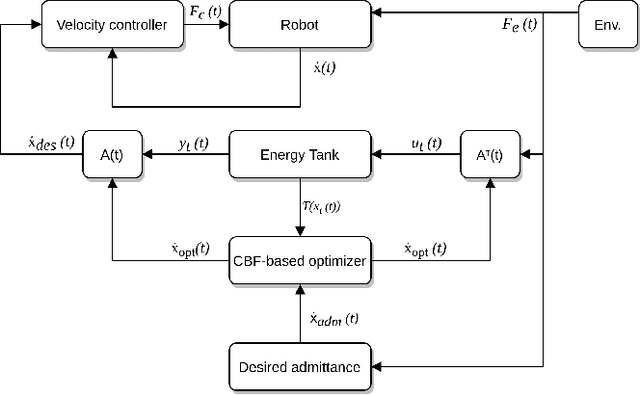


In Human-Robot Collaboration, the robot operates in a highly dynamic environment. Thus, it is pivotal to guarantee the robust stability of the system during the interaction but also a high flexibility of the robot behavior in order to ensure safety and reactivity to the variable conditions of the collaborative scenario. In this paper we propose a control architecture capable of maximizing the flexibility of the robot while guaranteeing a stable behavior when physically interacting with the environment. This is achieved by combining an energy tank based variable admittance architecture with control barrier functions. The proposed architecture is experimentally validated on a collaborative robot.