 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBidirectional Communication Control for Human-Robot Collaboration
Paper and Code
Jun 10, 2022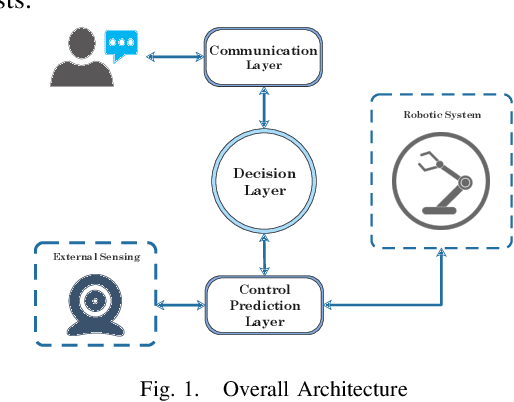
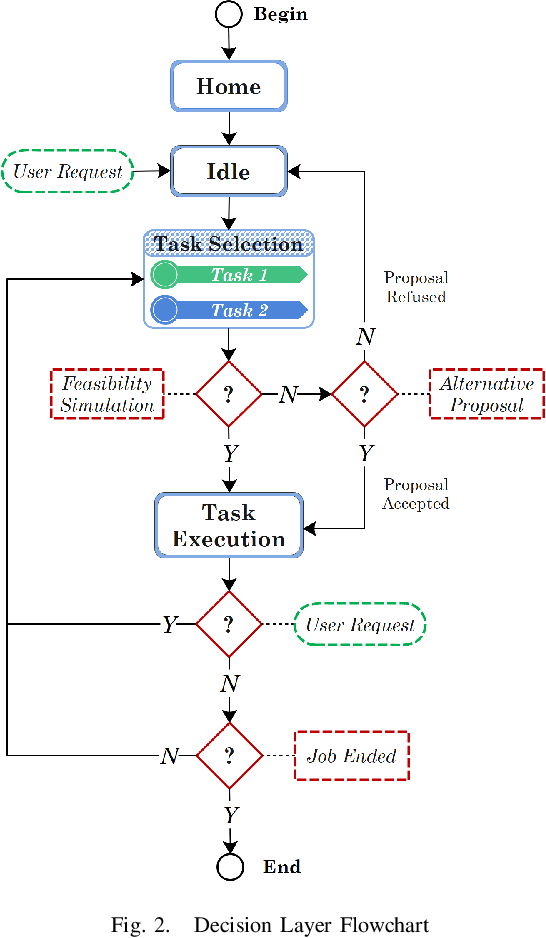
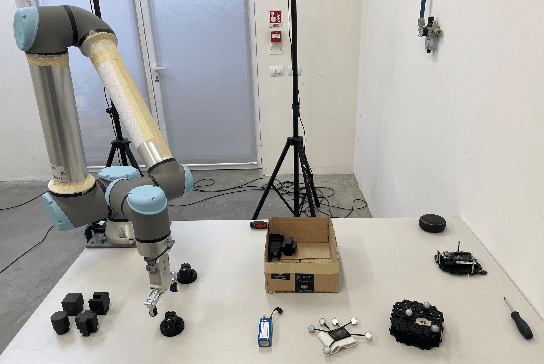

A fruitful collaboration is based on the mutual knowledge of each other skills and on the possibility of communicating their own limits and proposing alternatives to adapt the execution of a task to the capabilities of the collaborators. This paper aims at reproducing such a scenario in a human-robot collaboration setting by proposing a novel communication control architecture. Exploiting control barrier functions, the robot is made aware of its (dynamic) skills and limits and, thanks to a local predictor, it is able to assess if it is possible to execute a requested task and, if not, to propose alternative by relaxing some constraints. The controller is interfaced with a communication infrastructure that enables human and robot to set up a bidirectional communication about the task to execute and the human to take an informed decision on the behavior of the robot. A comparative experimental validation is proposed.