 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Native Closed-Loop Security for 6G-Enabled Cyber-Physical Systems: From Edge Detection to Network-Wide Mitigation
Jun 06, 2026In sixth-generation (6G) networks, billions of cyber-physical systems (CPSs) - autonomous vehicles, smart grids, industrial robots, and remote-surgical equipment - will run over ultra-reliable low-latency slices, collapsing the gap between a remote breach and physical harm to milliseconds, a budget perimeter firewalls and centralised security operations centres cannot meet. This survey reframes 6G CPS security as a closed-loop, AI-native pipeline that senses at the multi-access edge computing (MEC) tier, using minute-scale call-detail records (CDRs) for baseline learning and sub-millisecond RAN/Open-RAN (O-RAN) telemetry for the latency-critical path. It decides locally with compressed deep models, mitigates network-wide via SDN, NFV, and O-RAN controllers, and retrains through federated learning (FL) and digital-twin (DT) replay. We formalise a per-slice, tail-bounded latency contract on the sense, detect, and mitigate stages, enforced at a slice-dependent tail percentile (p99 for safety-critical URLLC slices). Organising 128 peer-reviewed studies (2017-2026) under a PRISMA 2020 protocol, we (i) map the 6G/CPS threat surface to MITRE ATT&CK and a CDR-observable feature space; (ii) unify edge anomaly detection and DDoS classification across twelve datasets and statistical, graph, and transformer models; (iii) synthesise SDN/NFV/O-RAN primitives into one closed-loop reference architecture; (iv) treat FL, large language models (LLMs), DT, post-quantum cryptography (PQC), zero-trust architecture (ZTA), and explainable AI as cross-cutting enablers, not parallel pillars; and (v) consolidate open problems into five directions spanning data, latency, trust, standardisation, and evaluation.
iDriving: Toward Safe and Efficient Infrastructure-directed Autonomous Driving
Jul 18, 2022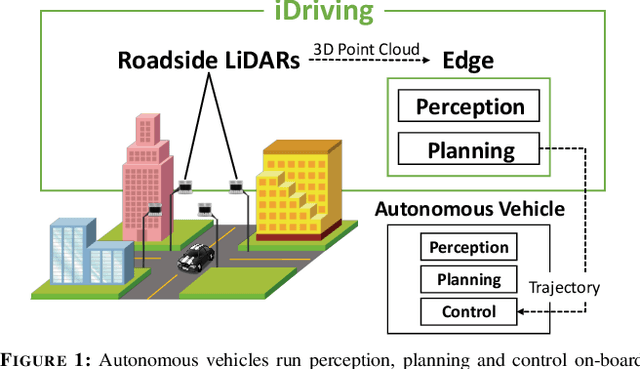
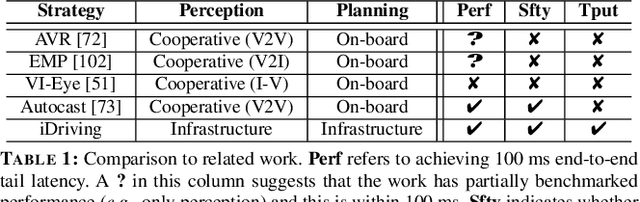
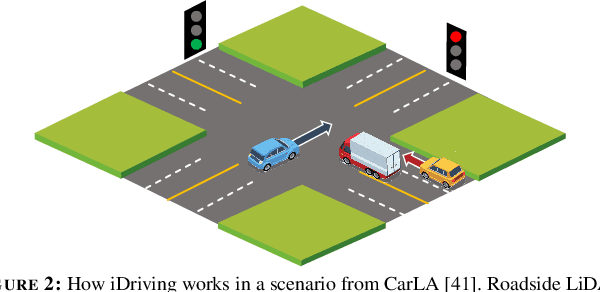
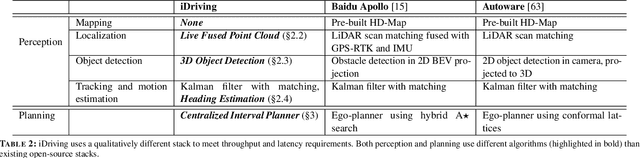
Autonomous driving will become pervasive in the coming decades. iDriving improves the safety of autonomous driving at intersections and increases efficiency by improving traffic throughput at intersections. In iDriving, roadside infrastructure remotely drives an autonomous vehicle at an intersection by offloading perception and planning from the vehicle to roadside infrastructure. To achieve this, iDriving must be able to process voluminous sensor data at full frame rate with a tail latency of less than 100 ms, without sacrificing accuracy. We describe algorithms and optimizations that enable it to achieve this goal using an accurate and lightweight perception component that reasons on composite views derived from overlapping sensors, and a planner that jointly plans trajectories for multiple vehicles. In our evaluations, iDriving always ensures safe passage of vehicles, while autonomous driving can only do so 27% of the time. iDriving also results in 5x lower wait times than other approaches because it enables traffic-light free intersections.
ARES: Accurate, Autonomous, Near Real-time 3D Reconstruction using Drones
Apr 20, 2021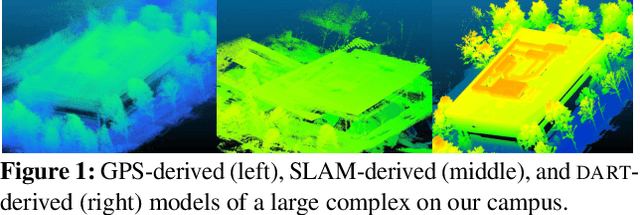
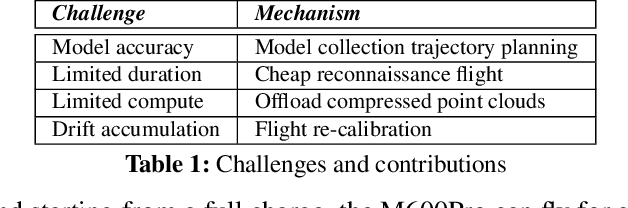
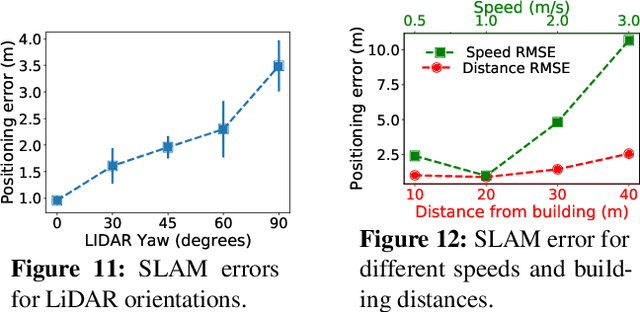
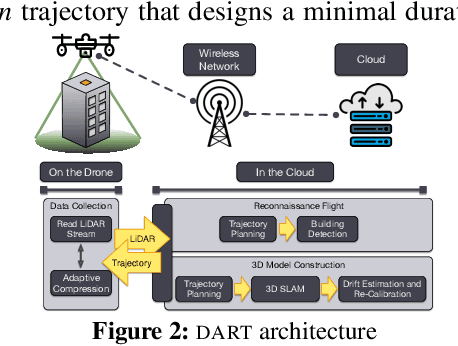
Drones will revolutionize 3D modeling. A 3D model represents an accurate reconstruction of an object or structure. This paper explores the design and implementation of ARES, which provides near real-time, accurate reconstruction of 3D models using a drone-mounted LiDAR; such a capability can be useful to document construction or check aircraft integrity between flights. Accurate reconstruction requires high drone positioning accuracy, and, because GPS can be in accurate, ARES uses SLAM. However, in doing so it must deal with several competing constraints: drone battery and compute resources, SLAM error accumulation, and LiDAR resolution. ARES uses careful trajectory design to find a sweet spot in this constraint space, a fast reconnaissance flight to narrow the search area for structures, and offloads expensive computations to the cloud by streaming compressed LiDAR data over LTE. ARES reconstructs large structures to within 10s of cms and incurs less than 100 ms compute latency.