 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiDriving: Toward Safe and Efficient Infrastructure-directed Autonomous Driving
Jul 18, 2022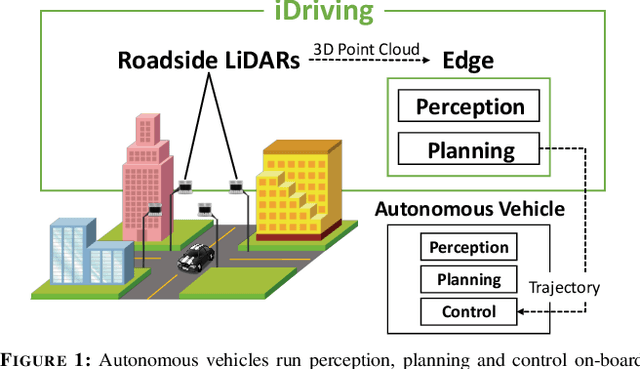
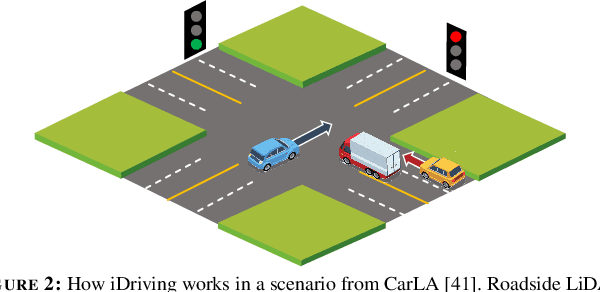
Autonomous driving will become pervasive in the coming decades. iDriving improves the safety of autonomous driving at intersections and increases efficiency by improving traffic throughput at intersections. In iDriving, roadside infrastructure remotely drives an autonomous vehicle at an intersection by offloading perception and planning from the vehicle to roadside infrastructure. To achieve this, iDriving must be able to process voluminous sensor data at full frame rate with a tail latency of less than 100 ms, without sacrificing accuracy. We describe algorithms and optimizations that enable it to achieve this goal using an accurate and lightweight perception component that reasons on composite views derived from overlapping sensors, and a planner that jointly plans trajectories for multiple vehicles. In our evaluations, iDriving always ensures safe passage of vehicles, while autonomous driving can only do so 27% of the time. iDriving also results in 5x lower wait times than other approaches because it enables traffic-light free intersections.