 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproaches, Challenges, and Applications for Deep Visual Odometry: Toward to Complicated and Emerging Areas
Sep 06, 2020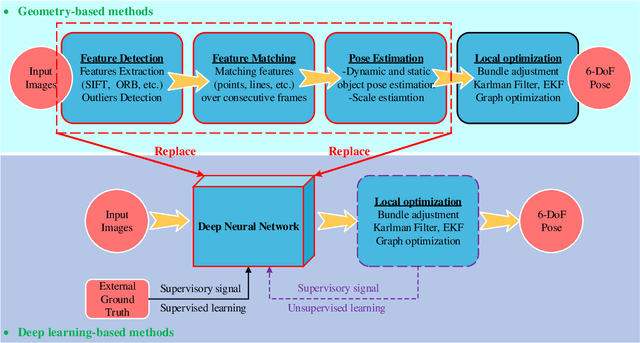

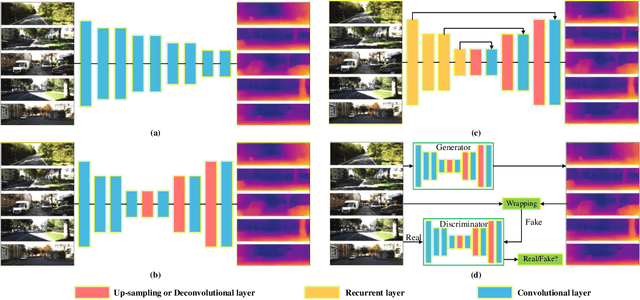
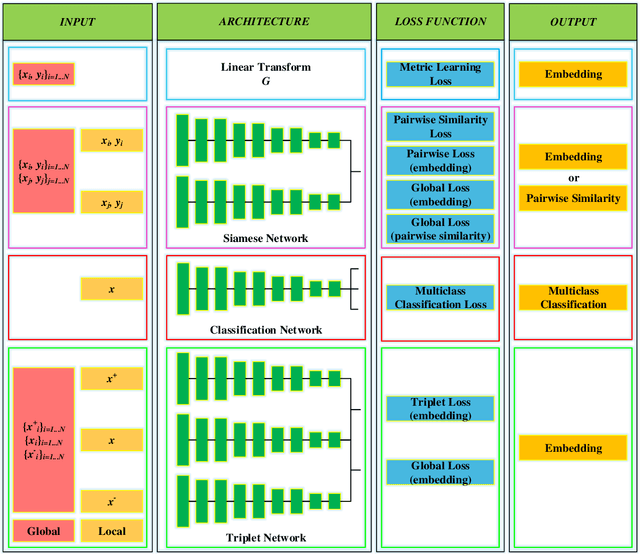
Visual odometry (VO) is a prevalent way to deal with the relative localization problem, which is becoming increasingly mature and accurate, but it tends to be fragile under challenging environments. Comparing with classical geometry-based methods, deep learning-based methods can automatically learn effective and robust representations, such as depth, optical flow, feature, ego-motion, etc., from data without explicit computation. Nevertheless, there still lacks a thorough review of the recent advances of deep learning-based VO (Deep VO). Therefore, this paper aims to gain a deep insight on how deep learning can profit and optimize the VO systems. We first screen out a number of qualifications including accuracy, efficiency, scalability, dynamicity, practicability, and extensibility, and employ them as the criteria. Then, using the offered criteria as the uniform measurements, we detailedly evaluate and discuss how deep learning improves the performance of VO from the aspects of depth estimation, feature extraction and matching, pose estimation. We also summarize the complicated and emerging areas of Deep VO, such as mobile robots, medical robots, augmented reality and virtual reality, etc. Through the literature decomposition, analysis, and comparison, we finally put forward a number of open issues and raise some future research directions in this field.
A feature-supervised generative adversarial network for environmental monitoring during hazy days
Aug 05, 2020
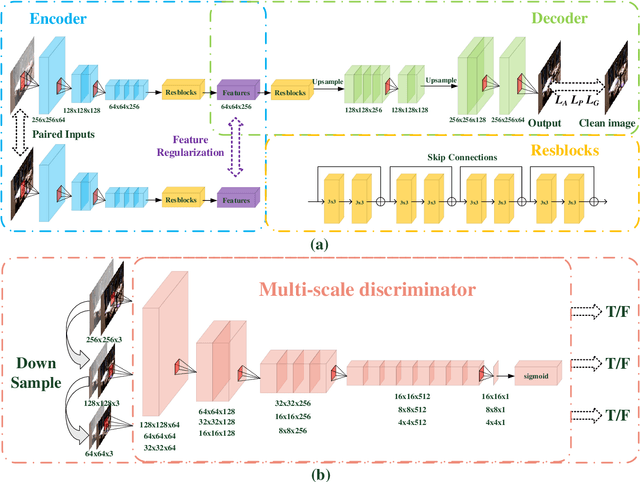
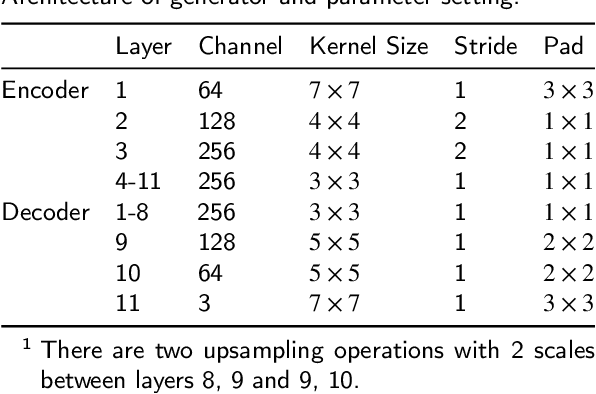
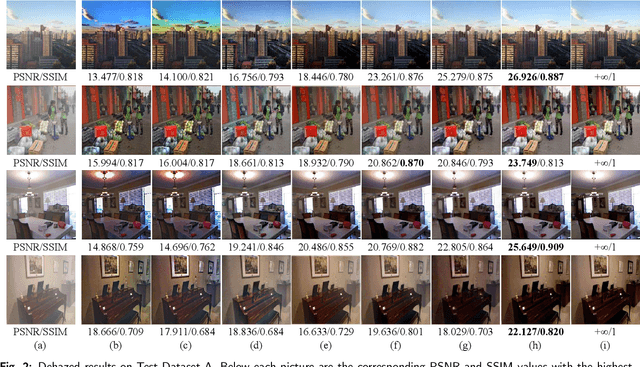
The adverse haze weather condition has brought considerable difficulties in vision-based environmental applications. While, until now, most of the existing environmental monitoring studies are under ordinary conditions, and the studies of complex haze weather conditions have been ignored. Thence, this paper proposes a feature-supervised learning network based on generative adversarial networks (GAN) for environmental monitoring during hazy days. Its main idea is to train the model under the supervision of feature maps from the ground truth. Four key technical contributions are made in the paper. First, pairs of hazy and clean images are used as inputs to supervise the encoding process and obtain high-quality feature maps. Second, the basic GAN formulation is modified by introducing perception loss, style loss, and feature regularization loss to generate better results. Third, multi-scale images are applied as the input to enhance the performance of discriminator. Finally, a hazy remote sensing dataset is created for testing our dehazing method and environmental detection. Extensive experimental results show that the proposed method has achieved better performance than current state-of-the-art methods on both synthetic datasets and real-world remote sensing images.