 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the Benefits of Vision Foundation Models for Unsupervised Domain Adaptation
Jun 17, 2024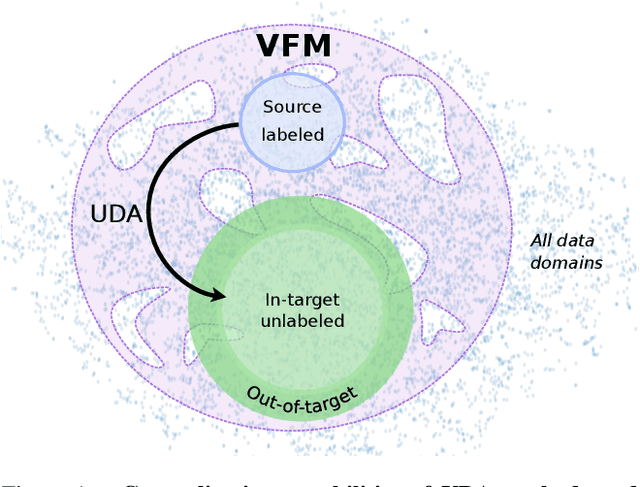
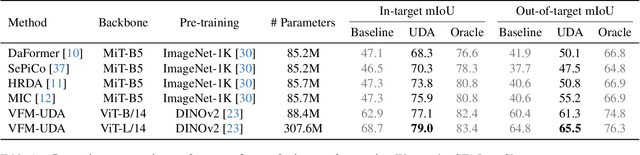
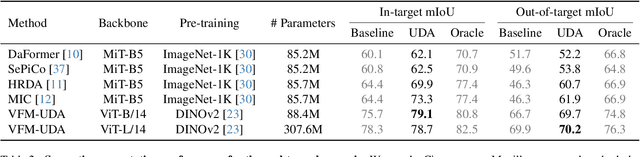
Achieving robust generalization across diverse data domains remains a significant challenge in computer vision. This challenge is important in safety-critical applications, where deep-neural-network-based systems must perform reliably under various environmental conditions not seen during training. Our study investigates whether the generalization capabilities of Vision Foundation Models (VFMs) and Unsupervised Domain Adaptation (UDA) methods for the semantic segmentation task are complementary. Results show that combining VFMs with UDA has two main benefits: (a) it allows for better UDA performance while maintaining the out-of-distribution performance of VFMs, and (b) it makes certain time-consuming UDA components redundant, thus enabling significant inference speedups. Specifically, with equivalent model sizes, the resulting VFM-UDA method achieves an 8.4$\times$ speed increase over the prior non-VFM state of the art, while also improving performance by +1.2 mIoU in the UDA setting and by +6.1 mIoU in terms of out-of-distribution generalization. Moreover, when we use a VFM with 3.6$\times$ more parameters, the VFM-UDA approach maintains a 3.3$\times$ speed up, while improving the UDA performance by +3.1 mIoU and the out-of-distribution performance by +10.3 mIoU. These results underscore the significant benefits of combining VFMs with UDA, setting new standards and baselines for Unsupervised Domain Adaptation in semantic segmentation.
Exploiting Image Translations via Ensemble Self-Supervised Learning for Unsupervised Domain Adaptation
Jul 13, 2021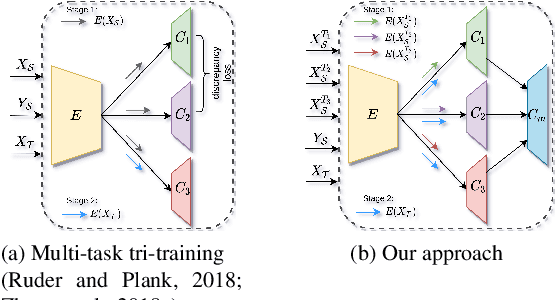
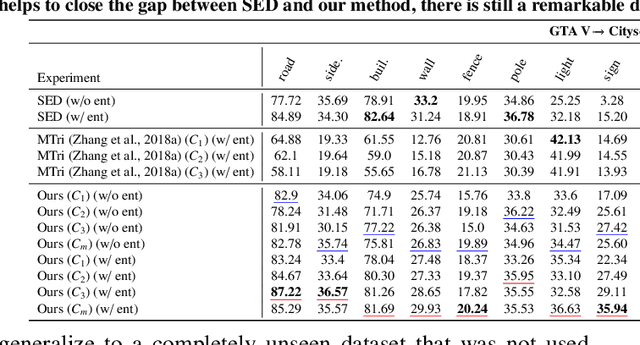

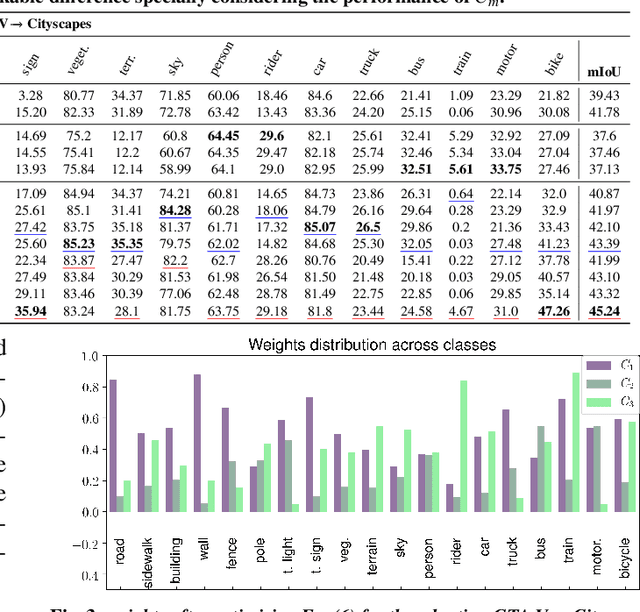
We introduce an unsupervised domain adaption (UDA) strategy that combines multiple image translations, ensemble learning and self-supervised learning in one coherent approach. We focus on one of the standard tasks of UDA in which a semantic segmentation model is trained on labeled synthetic data together with unlabeled real-world data, aiming to perform well on the latter. To exploit the advantage of using multiple image translations, we propose an ensemble learning approach, where three classifiers calculate their prediction by taking as input features of different image translations, making each classifier learn independently, with the purpose of combining their outputs by sparse Multinomial Logistic Regression. This regression layer known as meta-learner helps to reduce the bias during pseudo label generation when performing self-supervised learning and improves the generalizability of the model by taking into consideration the contribution of each classifier. We evaluate our method on the standard UDA benchmarks, i.e. adapting GTA V and Synthia to Cityscapes, and achieve state-of-the-art results in the mean intersection over union metric. Extensive ablation experiments are reported to highlight the advantageous properties of our proposed UDA strategy.