 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat the HoloLens Maps Is Your Workspace: Fast Mapping and Set-up of Robot Cells via Head Mounted Displays and Augmented Reality
May 26, 2020
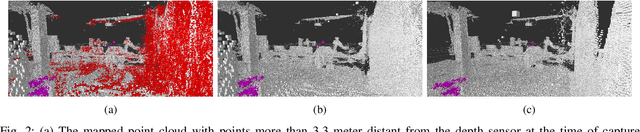
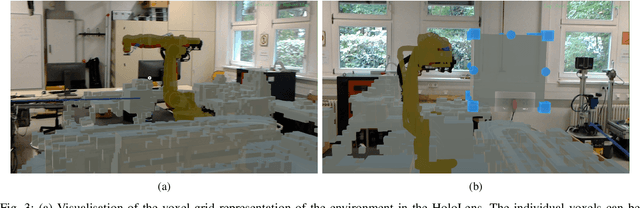
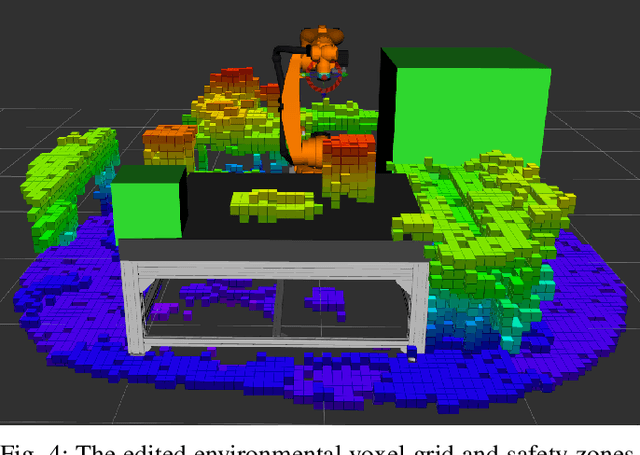
Classical methods of modelling and mapping robot work cells are time consuming, expensive and involve expert knowledge. We present a novel approach to mapping and cell setup using modern Head Mounted Displays (HMDs) that possess self-localisation and mapping capabilities. We leveraged these capabilities to create a point cloud of the environment and build an OctoMap - a voxel occupancy grid representation of the robot's workspace for path planning. Through the use of Augmented Reality (AR) interactions, the user can edit the created Octomap and add security zones. We perform comprehensive tests of the HoloLens' depth sensing capabilities and the quality of the resultant point cloud. A high-end laser scanner is used to provide the ground truth for the evaluation of the point cloud quality. The amount of false-positive and false-negative voxels in the OctoMap are also tested.