 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecise but Natural Specification for Robot Tasks
Sep 20, 2018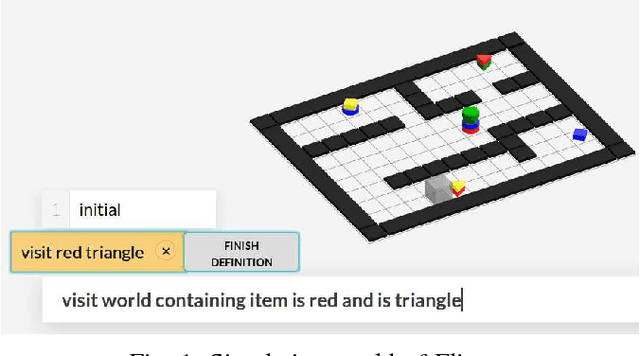
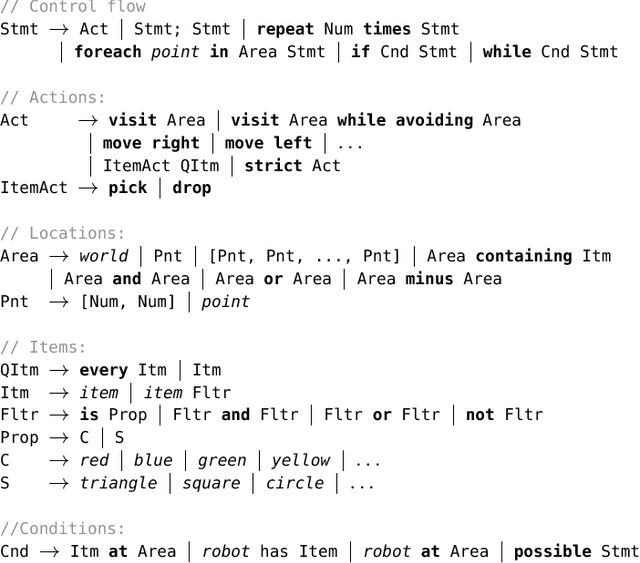
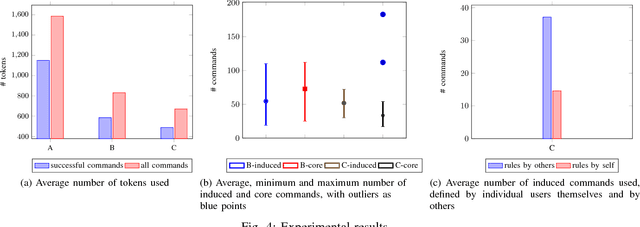
We present Flipper, a natural language interface for describing high-level task specifications for robots that are compiled into robot actions. Flipper starts with a formal core language for task planning that allows expressing rich temporal specifications and uses a semantic parser to provide a natural language interface. Flipper provides immediate visual feedback by executing an automatically constructed plan of the task in a graphical user interface. This allows the user to resolve potentially ambiguous interpretations. Flipper extends itself via naturalization: its users can add definitions for utterances, from which Flipper induces new rules and adds them to the core language, gradually growing a more and more natural task specification language. Flipper improves the naturalization by generalizing the definition provided by users. Unlike other task-specification systems, Flipper enables natural language interactions while maintaining the expressive power and formal precision of a programming language. We show through an initial user study that natural language interactions and generalization can considerably ease the description of tasks. Moreover, over time, users employ more and more concepts outside of the initial core language. Such extensions are available to the Flipper community, and users can use concepts that others have defined.