 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIR-VIO: Mutual Information Residual-based Visual Inertial Odometry with UWB Fusion for Robust Localization
Sep 08, 2021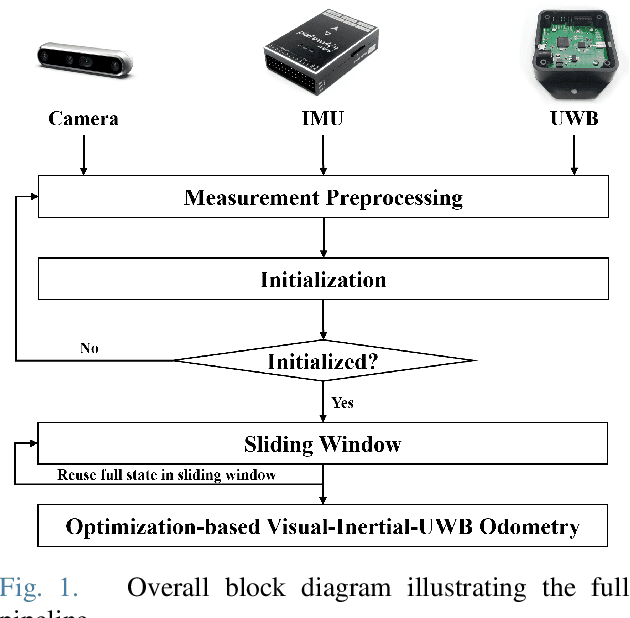
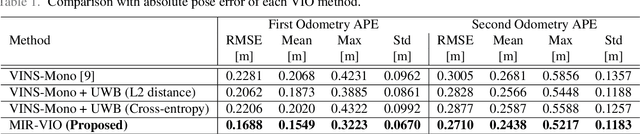
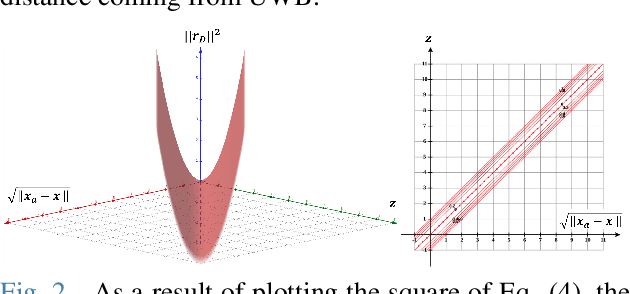
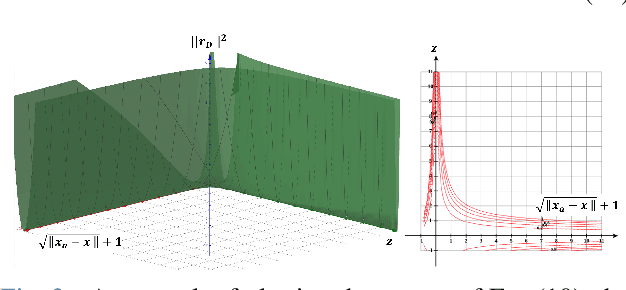
For many years, there has been an impressive progress on visual odometry applied to mobile robots and drones. However, the visual perception is still in the spotlight as a challenging field because the vision sensor has some problems in obtaining correct scale information with a monocular camera and also is vulnerable to a situation in which illumination is changed. In this paper, UWB sensor fusion is proposed in the visual inertial odometry algorithm as a solution to mitigate this problem. We designed a cost function based on mutual information considering the UWB. Considering the characteristic of the UWB signal model, where the uncertainty increases as the distance between the UWB anchor and the tag increases, we introduced a new residual term to the cost function. When the experiment was conducted in an indoor environment with the above methodology, the initialization problem in an environment with few feature points was solved through the UWB sensor fusion, and localization became robust. And when the residual term using the concept of mutual information was used, the most robust odometry could be obtained.
Run Your Visual-Inertial Odometry on NVIDIA Jetson: Benchmark Tests on a Micro Aerial Vehicle
Mar 02, 2021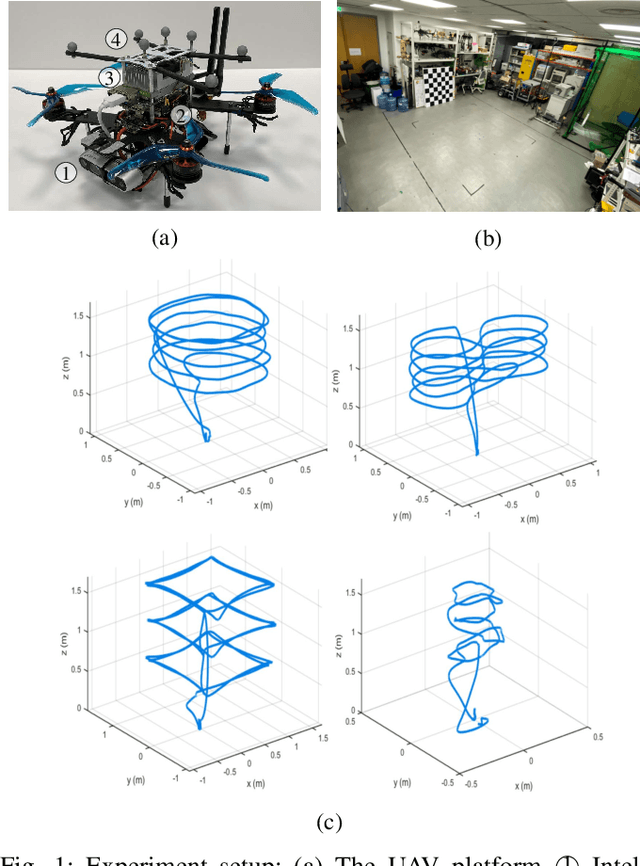
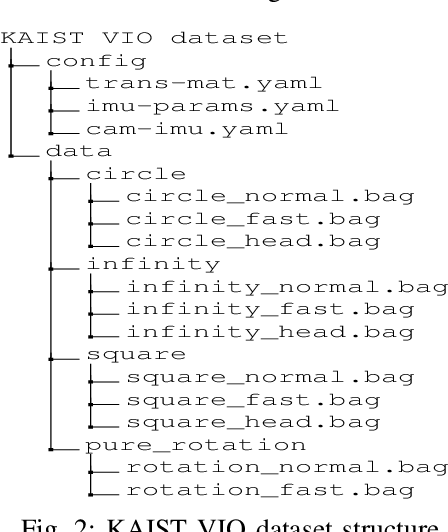
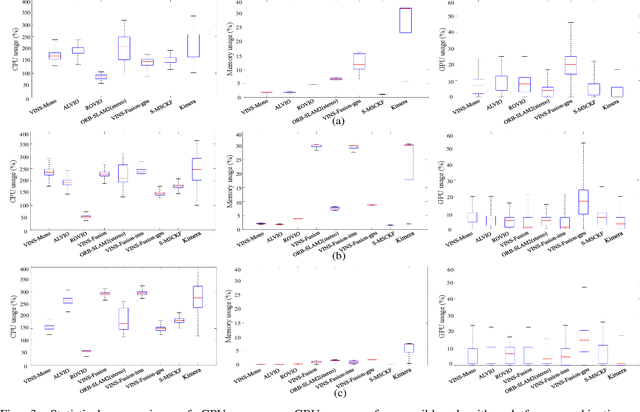
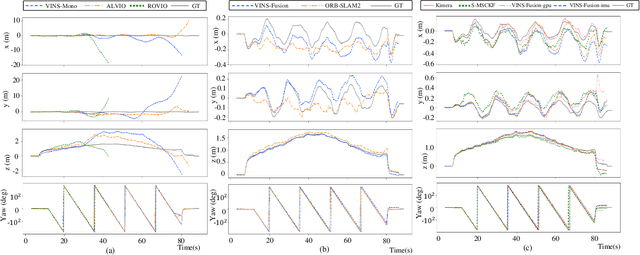
This paper presents benchmark tests of various visual(-inertial) odometry algorithms on NVIDIA Jetson platforms. The compared algorithms include mono and stereo, covering Visual Odometry (VO) and Visual-Inertial Odometry (VIO): VINS-Mono, VINS-Fusion, Kimera, ALVIO, Stereo-MSCKF, ORB-SLAM2 stereo, and ROVIO. As these methods are mainly used for unmanned aerial vehicles (UAVs), they must perform well in situations where the size of the processing board and weight is limited. Jetson boards released by NVIDIA satisfy these constraints as they have a sufficiently powerful central processing unit (CPU) and graphics processing unit (GPU) for image processing. However, in existing studies, the performance of Jetson boards as a processing platform for executing VO/VIO has not been compared extensively in terms of the usage of computing resources and accuracy. Therefore, this study compares representative VO/VIO algorithms on several NVIDIA Jetson platforms, namely NVIDIA Jetson TX2, Xavier NX, and AGX Xavier, and introduces a novel dataset 'KAIST VIO dataset' for UAVs. Including pure rotations, the dataset has several geometric trajectories that are harsh to visual(-inertial) state estimation. The evaluation is performed in terms of the accuracy of estimated odometry, CPU usage, and memory usage on various Jetson boards, algorithms, and trajectories. We present the {results of the} comprehensive benchmark test and release the dataset for the computer vision and robotics applications.