 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevisión de Métodos de Planificación de Camino de Cobertura para Entornos Agrícolas
Jul 02, 2024The use of an efficient coverage planning method is key for autonomous navigation in agricultural environments, where a robot must cover large areas of crops. This paper generally reviews the current state of the art of coverage path planning methods. Two widely used techniques applicable to agricultural environments are described in detail. The first consists of breaking down a complex field with obstacles into simpler subregions known as cells, to subsequently generate a coverage pattern in each of them. The second analyzes spaces composed of parallel strips through which the robot must circulate, in order to find the optimal order of visiting strips that minimizes the total distance traveled. Additionally, the combination of both techniques is discussed in order to obtain a more efficient global coverage plan. This analysis was conceived to be implemented with the soybean crop weeding robot developed at CIFASIS (CONICET-UNR).
GNSS-stereo-inertial SLAM for arable farming
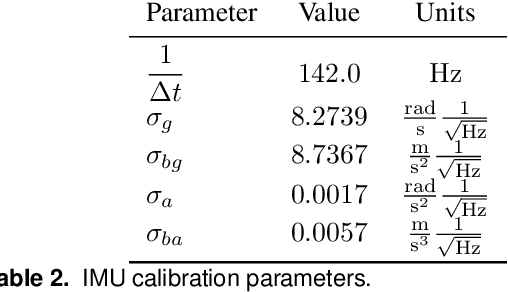
Jul 24, 2023The accelerating pace in the automation of agricultural tasks demands highly accurate and robust localization systems for field robots. Simultaneous Localization and Mapping (SLAM) methods inevitably accumulate drift on exploratory trajectories and primarily rely on place revisiting and loop closing to keep a bounded global localization error. Loop closure techniques are significantly challenging in agricultural fields, as the local visual appearance of different views is very similar and might change easily due to weather effects. A suitable alternative in practice is to employ global sensor positioning systems jointly with the rest of the robot sensors. In this paper we propose and implement the fusion of global navigation satellite system (GNSS), stereo views, and inertial measurements for localization purposes. Specifically, we incorporate, in a tightly coupled manner, GNSS measurements into the stereo-inertial ORB-SLAM3 pipeline. We thoroughly evaluate our implementation in the sequences of the Rosario data set, recorded by an autonomous robot in soybean fields, and our own in-house data. Our data includes measurements from a conventional GNSS, rarely included in evaluations of state-of-the-art approaches. We characterize the performance of GNSS-stereo-inertial SLAM in this application case, reporting pose error reductions between 10% and 30% compared to visual-inertial and loosely coupled GNSS-stereo-inertial baselines. In addition to such analysis, we also release the code of our implementation as open source.
The Rosario Dataset: Multisensor Data for Localization and Mapping in Agricultural Environments
Mar 08, 2019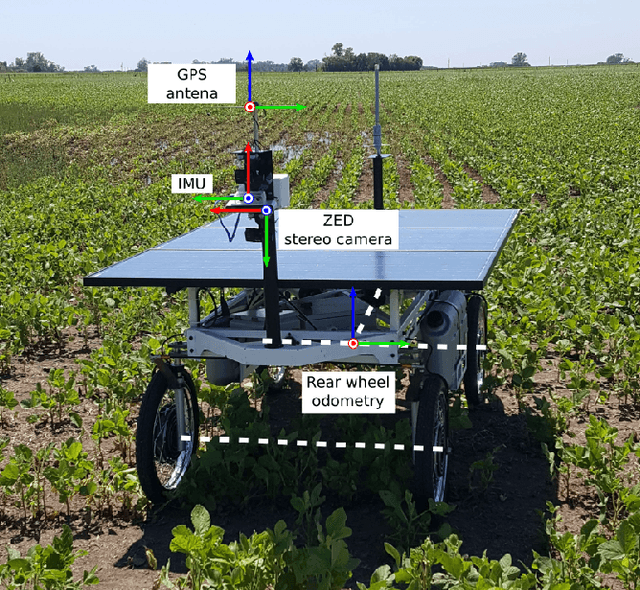

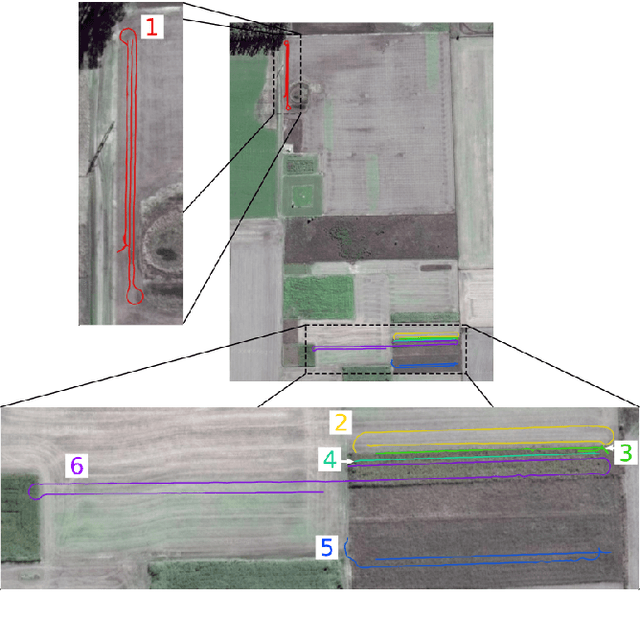
In this paper we present The Rosario Dataset, a collection of sensor data for autonomous mobile robotics in agricultural scenes. The dataset is motivated by the lack of realistic sensor readings gathered by a mobile robot in such environments. It consists of 6 sequences recorded in soybean fields showing real and challenging cases: highly repetitive scenes, reflection and burned images caused by direct sunlight and rough terrain among others. The dataset was conceived in order to provide a benchmark and contribute to the agricultural SLAM/odometry and sensor fusion research. It contains synchronized readings of several sensors: wheel odometry, IMU, stereo camera and a GPS-RTK system. The dataset is publicly available in http://www.cifasis-conicet.gov.ar/robot/.