 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Rosario Dataset: Multisensor Data for Localization and Mapping in Agricultural Environments
Paper and Code
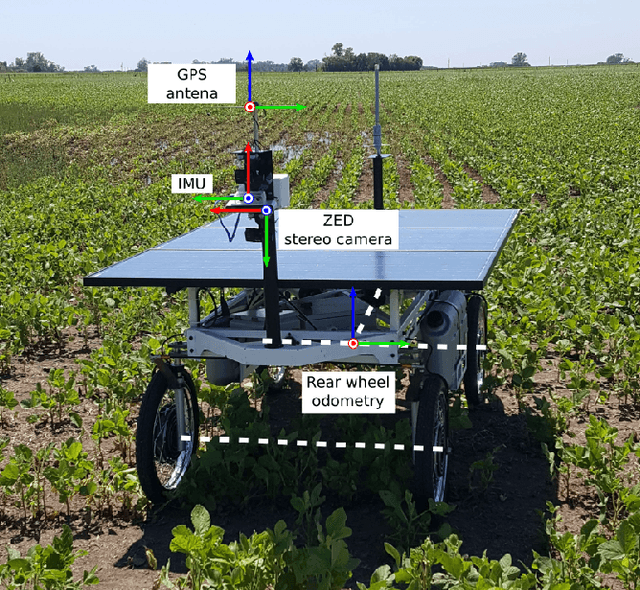

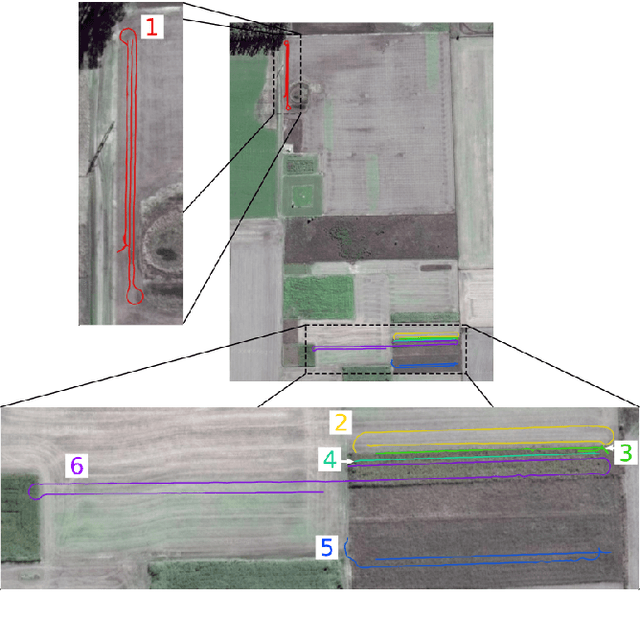
In this paper we present The Rosario Dataset, a collection of sensor data for autonomous mobile robotics in agricultural scenes. The dataset is motivated by the lack of realistic sensor readings gathered by a mobile robot in such environments. It consists of 6 sequences recorded in soybean fields showing real and challenging cases: highly repetitive scenes, reflection and burned images caused by direct sunlight and rough terrain among others. The dataset was conceived in order to provide a benchmark and contribute to the agricultural SLAM/odometry and sensor fusion research. It contains synchronized readings of several sensors: wheel odometry, IMU, stereo camera and a GPS-RTK system. The dataset is publicly available in http://www.cifasis-conicet.gov.ar/robot/.