 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Rosario Dataset v2: Multimodal Dataset for Agricultural Robotics
Aug 29, 2025We present a multi-modal dataset collected in a soybean crop field, comprising over two hours of recorded data from sensors such as stereo infrared camera, color camera, accelerometer, gyroscope, magnetometer, GNSS (Single Point Positioning, Real-Time Kinematic and Post-Processed Kinematic), and wheel odometry. This dataset captures key challenges inherent to robotics in agricultural environments, including variations in natural lighting, motion blur, rough terrain, and long, perceptually aliased sequences. By addressing these complexities, the dataset aims to support the development and benchmarking of advanced algorithms for localization, mapping, perception, and navigation in agricultural robotics. The platform and data collection system is designed to meet the key requirements for evaluating multi-modal SLAM systems, including hardware synchronization of sensors, 6-DOF ground truth and loops on long trajectories. We run multimodal state-of-the art SLAM methods on the dataset, showcasing the existing limitations in their application on agricultural settings. The dataset and utilities to work with it are released on https://cifasis.github.io/rosariov2/.
* First published on The International Journal of Robotics Research: https://journals.sagepub.com/doi/10.1177/02783649251368909
GNSS-stereo-inertial SLAM for arable farming
Jul 24, 2023The accelerating pace in the automation of agricultural tasks demands highly accurate and robust localization systems for field robots. Simultaneous Localization and Mapping (SLAM) methods inevitably accumulate drift on exploratory trajectories and primarily rely on place revisiting and loop closing to keep a bounded global localization error. Loop closure techniques are significantly challenging in agricultural fields, as the local visual appearance of different views is very similar and might change easily due to weather effects. A suitable alternative in practice is to employ global sensor positioning systems jointly with the rest of the robot sensors. In this paper we propose and implement the fusion of global navigation satellite system (GNSS), stereo views, and inertial measurements for localization purposes. Specifically, we incorporate, in a tightly coupled manner, GNSS measurements into the stereo-inertial ORB-SLAM3 pipeline. We thoroughly evaluate our implementation in the sequences of the Rosario data set, recorded by an autonomous robot in soybean fields, and our own in-house data. Our data includes measurements from a conventional GNSS, rarely included in evaluations of state-of-the-art approaches. We characterize the performance of GNSS-stereo-inertial SLAM in this application case, reporting pose error reductions between 10% and 30% compared to visual-inertial and loosely coupled GNSS-stereo-inertial baselines. In addition to such analysis, we also release the code of our implementation as open source.
Experimental Evaluation of Visual-Inertial Odometry Systems for Arable Farming
Jun 10, 2022
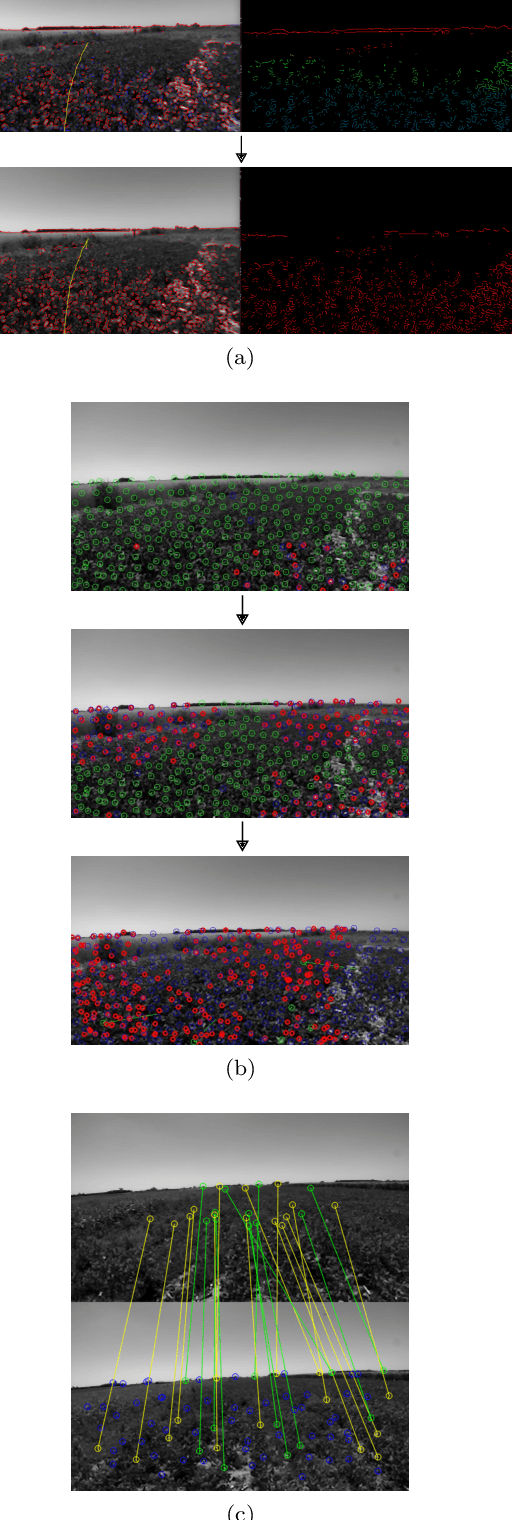


The farming industry constantly seeks the automation of different processes involved in agricultural production, such as sowing, harvesting and weed control. The use of mobile autonomous robots to perform those tasks is of great interest. Arable lands present hard challenges for Simultaneous Localization and Mapping (SLAM) systems, key for mobile robotics, given the visual difficulty due to the highly repetitive scene and the crop leaves movement caused by the wind. In recent years, several Visual-Inertial Odometry (VIO) and SLAM systems have been developed. They have proved to be robust and capable of achieving high accuracy in indoor and outdoor urban environments. However, they were not properly assessed in agricultural fields. In this work we assess the most relevant state-of-the-art VIO systems in terms of accuracy and processing time on arable lands in order to better understand how they behave on these environments. In particular, the evaluation is carried out on a collection of sensor data recorded by our wheeled robot in a soybean field, which was publicly released as the Rosario Dataset. The evaluation shows that the highly repetitive appearance of the environment, the strong vibration produced by the rough terrain and the movement of the leaves caused by the wind, expose the limitations of the current state-of-the-art VIO and SLAM systems. We analyze the systems failures and highlight the observed drawbacks, including initialization failures, tracking loss and sensitivity to IMU saturation. Finally, we conclude that even though certain systems like ORB-SLAM3 and S-MSCKF show good results with respect to others, more improvements should be done to make them reliable in agricultural fields for certain applications such as soil tillage of crop rows and pesticide spraying.
WGANVO: Monocular Visual Odometry based on Generative Adversarial Networks
Jul 27, 2020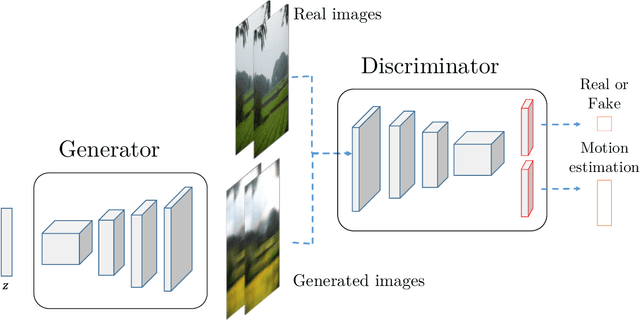



In this work we present WGANVO, a Deep Learning based monocular Visual Odometry method. In particular, a neural network is trained to regress a pose estimate from an image pair. The training is performed using a semi-supervised approach. Unlike geometry based monocular methods, the proposed method can recover the absolute scale of the scene without neither prior knowledge nor extra information. The evaluation of the system is carried out on the well-known KITTI dataset where it is shown to work in real time and the accuracy obtained is encouraging to continue the development of Deep Learning based methods.