 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBounding-Box Inference for Error-Aware Model-Based Reinforcement Learning
Jun 23, 2024



In model-based reinforcement learning, simulated experiences from the learned model are often treated as equivalent to experience from the real environment. However, when the model is inaccurate, it can catastrophically interfere with policy learning. Alternatively, the agent might learn about the model's accuracy and selectively use it only when it can provide reliable predictions. We empirically explore model uncertainty measures for selective planning and show that best results require distribution insensitive inference to estimate the uncertainty over model-based updates. To that end, we propose and evaluate bounding-box inference, which operates on bounding-boxes around sets of possible states and other quantities. We find that bounding-box inference can reliably support effective selective planning.
Selective Dyna-style Planning Under Limited Model Capacity
Jul 05, 2020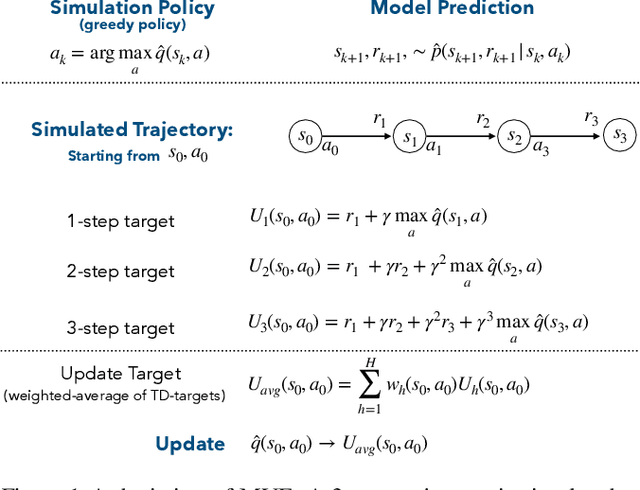
In model-based reinforcement learning, planning with an imperfect model of the environment has the potential to harm learning progress. But even when a model is imperfect, it may still contain information that is useful for planning. In this paper, we investigate the idea of using an imperfect model selectively. The agent should plan in parts of the state space where the model would be helpful but refrain from using the model where it would be harmful. An effective selective planning mechanism requires estimating predictive uncertainty, which arises out of aleatoric uncertainty, parameter uncertainty, and model inadequacy, among other sources. Prior work has focused on parameter uncertainty for selective planning. In this work, we emphasize the importance of model inadequacy. We show that heteroscedastic regression can signal predictive uncertainty arising from model inadequacy that is complementary to that which is detected by methods designed for parameter uncertainty, indicating that considering both parameter uncertainty and model inadequacy may be a more promising direction for effective selective planning than either in isolation.