 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Flexible Job Shop Scheduling Representation of the Autonomous In-Space Assembly Task Assignment Problem
Mar 26, 2020
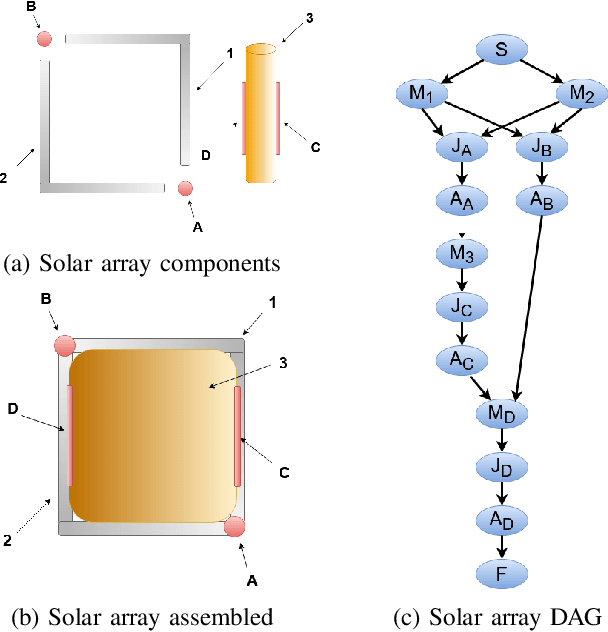
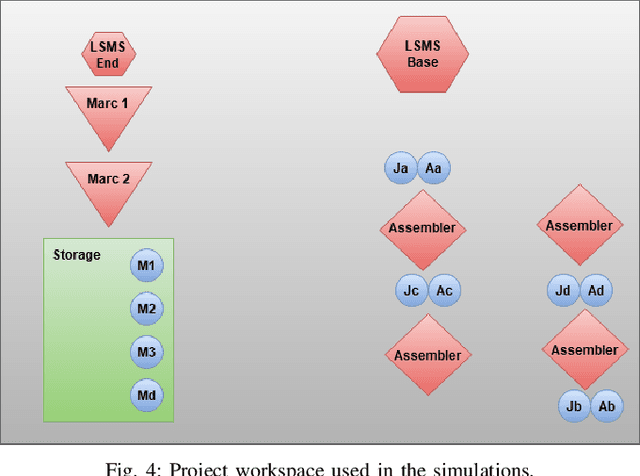
As in-space exploration increases, autonomous systems will play a vital role in building the necessary facilities to support exploration. To this end, an autonomous system must be able to assign tasks in a scheme that efficiently completes all of the jobs in the desired project. This research proposes a flexible job shop problem (FJSP) representation to characterize an autonomous assembly project and then proposes both a mixed integer programming (MIP) solution formulation and a reinforcement learning (RL) solution formulation. The MIP formulation encodes all of the constraints and interjob dynamics a priori and was able to solve for the optimal solution to minimize the makespan. The RL formulation did not converge to an optimal solution but did successfully learn implicitly interjob dynamics through interaction with the reward function. Future work will include developing a solution formulation that utilizes the strengths of both proposed solution methods to handle scaling in size and complexity.
Metrics and Optimization of Internal Poses for Highly Redundant Truss-Like Serialized Parallel Manipulators
Mar 26, 2020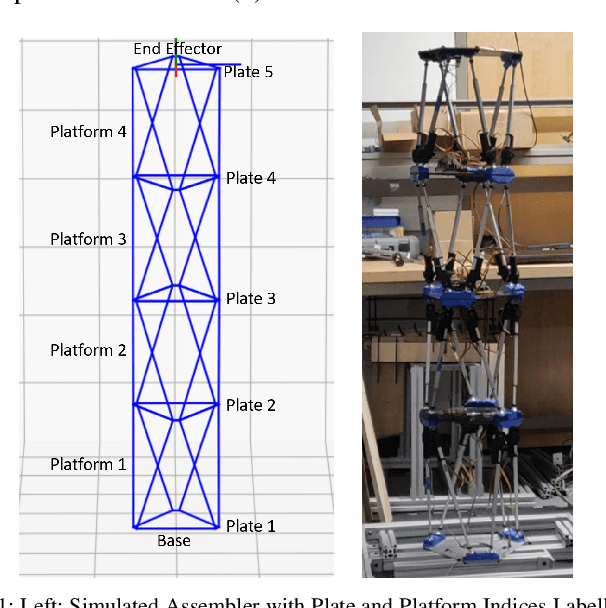
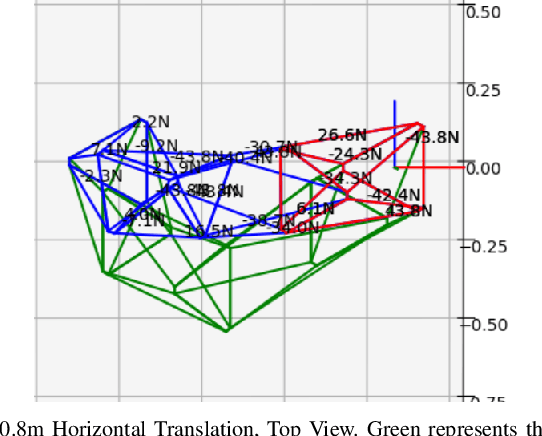
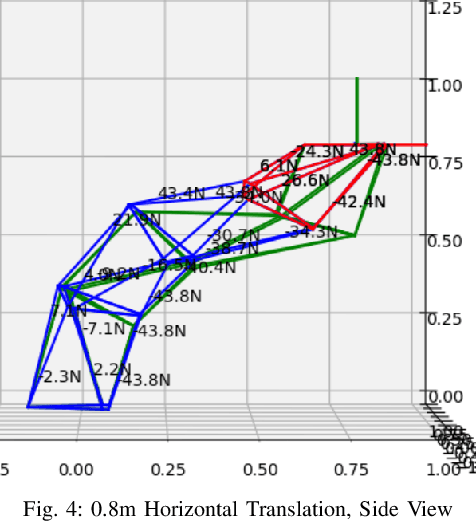
This paper presents a kinematic definition of a serialized Stewart platform designed for autonomous in-space assembly called an Assembler. The Assemblers architecture describes problems inherent to the inverse kinematics of over-actuated mixed kinematic systems. This paper also presents a methodology for optimizing poses. In order to accomplish this with the Assembler system, an algorithm for finding a feasible solution to its inverse kinematics was developed with a wrapper for a nonlinear optimization algorithm designed to minimize the magnitude of forces incurred by each actuator. A simulated version of an Assembler was placed into a number of representative poses, and the positions were optimized. The results of these optimizations are discussed in terms of actuator forces, reachability of the platform, and applicability to high-payload structure assembly capabilities.
Inverse Kinematics and Sensitivity Minimization of an n-Stack Stewart Platform
Nov 13, 2018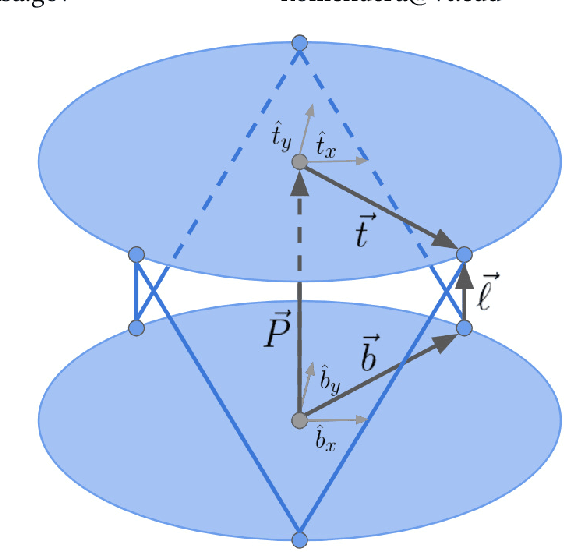
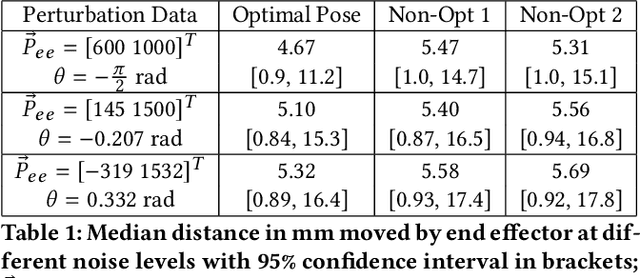
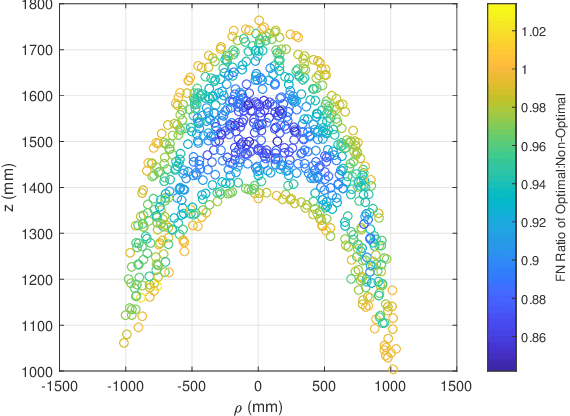
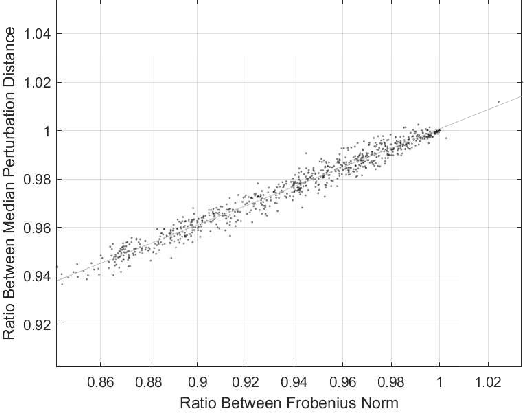
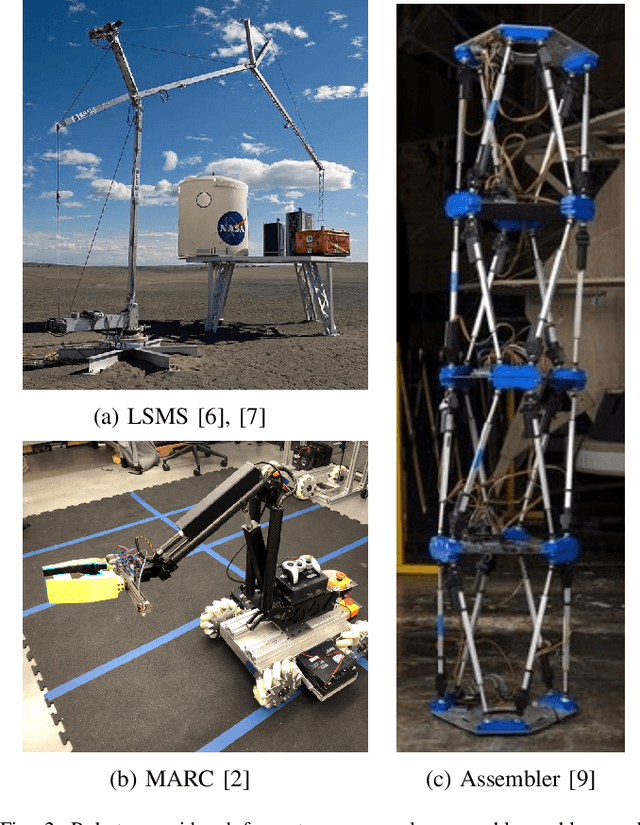
An autonomous system is presented to solve the problem of in space assembly, which can be used to further the NASA goal of deep space exploration. Of particular interest is the assembly of large truss structures, which requires precise and dexterous movement in a changing environment. A prototype of an autonomous manipulator called "Assemblers" was fabricated from an aggregation of Stewart Platform robots for the purpose of researching autonomous in space assembly capabilities. The forward kinematics for an Assembler is described by the set of translations and rotation angles for each component Stewart Platform, from which the position and orientation of the end effector are simple to calculate. However, selecting inverse kinematic poses, defined by the translations and rotation angles, for the Assembler requires coordination between each Stewart Platform and is an underconstrained non-linear optimization problem. For assembly tasks, it is ideal that the pose selected has the least sensitivity to disturbances possible. A method of sensitivity reduction is proposed by minimizing the Frobenius Norm (FN) of the Jacobian for the forward kinematics. The effectiveness of the FN method will be demonstrated through a Monte Carlo simulation method to model random motion internal to the structure.