 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetrics and Optimization of Internal Poses for Highly Redundant Truss-Like Serialized Parallel Manipulators
Mar 26, 2020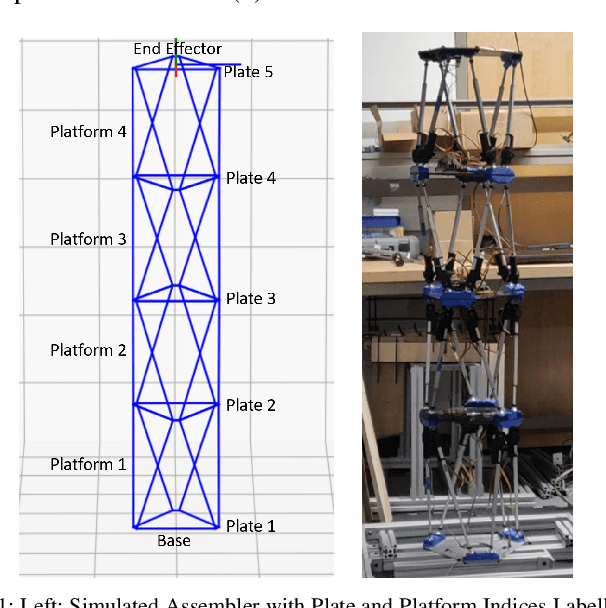
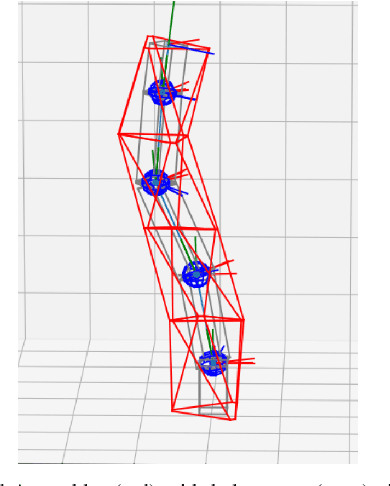
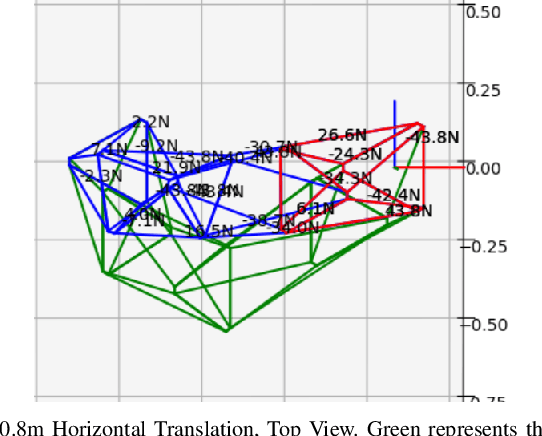
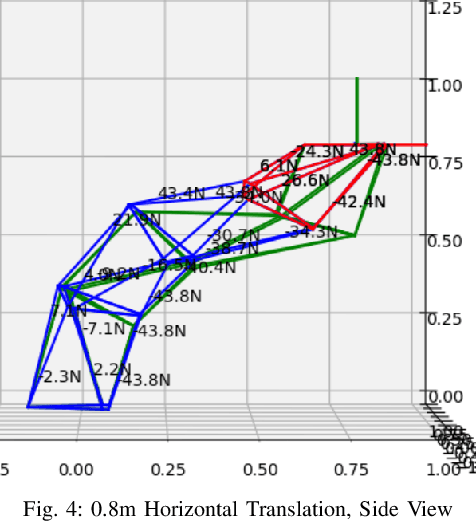
This paper presents a kinematic definition of a serialized Stewart platform designed for autonomous in-space assembly called an Assembler. The Assemblers architecture describes problems inherent to the inverse kinematics of over-actuated mixed kinematic systems. This paper also presents a methodology for optimizing poses. In order to accomplish this with the Assembler system, an algorithm for finding a feasible solution to its inverse kinematics was developed with a wrapper for a nonlinear optimization algorithm designed to minimize the magnitude of forces incurred by each actuator. A simulated version of an Assembler was placed into a number of representative poses, and the positions were optimized. The results of these optimizations are discussed in terms of actuator forces, reachability of the platform, and applicability to high-payload structure assembly capabilities.