 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe IMPTC Dataset: An Infrastructural Multi-Person Trajectory and Context Dataset
Jul 12, 2023



Inner-city intersections are among the most critical traffic areas for injury and fatal accidents. Automated vehicles struggle with the complex and hectic everyday life within those areas. Sensor-equipped smart infrastructures, which can cooperate with vehicles, can benefit automated traffic by extending the perception capabilities of drivers and vehicle perception systems. Additionally, they offer the opportunity to gather reproducible and precise data of a holistic scene understanding, including context information as a basis for training algorithms for various applications in automated traffic. Therefore, we introduce the Infrastructural Multi-Person Trajectory and Context Dataset (IMPTC). We use an intelligent public inner-city intersection in Germany with visual sensor technology. A multi-view camera and LiDAR system perceives traffic situations and road users' behavior. Additional sensors monitor contextual information like weather, lighting, and traffic light signal status. The data acquisition system focuses on Vulnerable Road Users (VRUs) and multi-agent interaction. The resulting dataset consists of eight hours of measurement data. It contains over 2,500 VRU trajectories, including pedestrians, cyclists, e-scooter riders, strollers, and wheelchair users, and over 20,000 vehicle trajectories at different day times, weather conditions, and seasons. In addition, to enable the entire stack of research capabilities, the dataset includes all data, starting from the sensor-, calibration- and detection data until trajectory and context data. The dataset is continuously expanded and is available online for non-commercial research at https://github.com/kav-institute/imptc-dataset.
Detecting Intentions of Vulnerable Road Users Based on Collective Intelligence
Sep 11, 2018
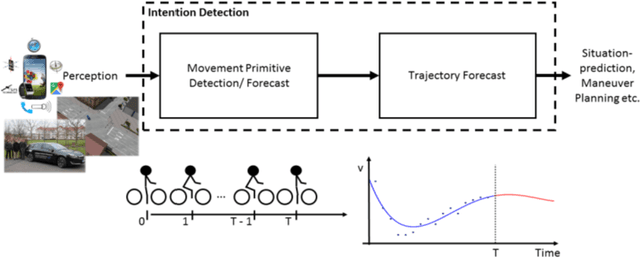


Vulnerable road users (VRUs, i.e. cyclists and pedestrians) will play an important role in future traffic. To avoid accidents and achieve a highly efficient traffic flow, it is important to detect VRUs and to predict their intentions. In this article a holistic approach for detecting intentions of VRUs by cooperative methods is presented. The intention detection consists of basic movement primitive prediction, e.g. standing, moving, turning, and a forecast of the future trajectory. Vehicles equipped with sensors, data processing systems and communication abilities, referred to as intelligent vehicles, acquire and maintain a local model of their surrounding traffic environment, e.g. crossing cyclists. Heterogeneous, open sets of agents (cooperating and interacting vehicles, infrastructure, e.g. cameras and laser scanners, and VRUs equipped with smart devices and body-worn sensors) exchange information forming a multi-modal sensor system with the goal to reliably and robustly detect VRUs and their intentions under consideration of real time requirements and uncertainties. The resulting model allows to extend the perceptual horizon of the individual agent beyond their own sensory capabilities, enabling a longer forecast horizon. Concealments, implausibilities and inconsistencies are resolved by the collective intelligence of cooperating agents. Novel techniques of signal processing and modelling in combination with analytical and learning based approaches of pattern and activity recognition are used for detection, as well as intention prediction of VRUs. Cooperation, by means of probabilistic sensor and knowledge fusion, takes place on the level of perception and intention recognition. Based on the requirements of the cooperative approach for the communication a new strategy for an ad hoc network is proposed.
Cooperative Tracking of Cyclists Based on Smart Devices and Infrastructure
Jul 03, 2018
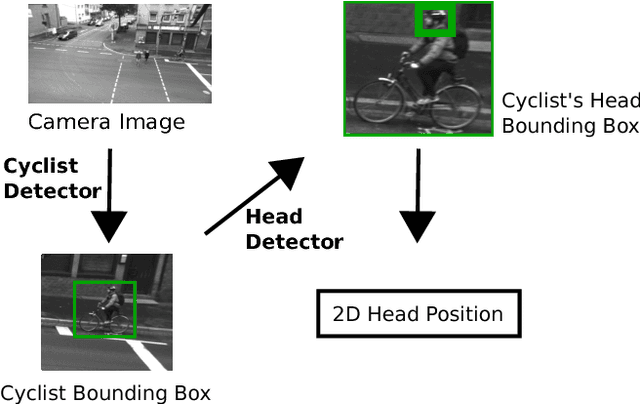
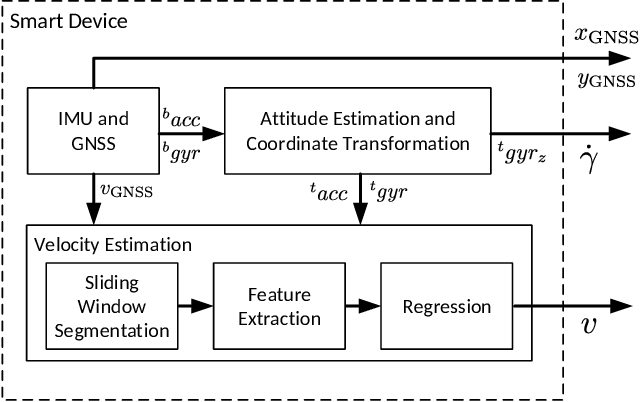

In future traffic scenarios, vehicles and other traffic participants will be interconnected and equipped with various types of sensors, allowing for cooperation based on data or information exchange. This article presents an approach to cooperative tracking of cyclists using smart devices and infrastructure-based sensors. A smart device is carried by the cyclists and an intersection is equipped with a wide angle stereo camera system. Two tracking models are presented and compared. The first model is based on the stereo camera system detections only, whereas the second model cooperatively combines the camera based detections with velocity and yaw rate data provided by the smart device. Our aim is to overcome limitations of tracking approaches based on single data sources. We show in numerical evaluations on scenes where cyclists are starting or turning right that the cooperation leads to an improvement in both the ability to keep track of a cyclist and the accuracy of the track particularly when it comes to occlusions in the visual system. We, therefore, contribute to the safety of vulnerable road users in future traffic.
Highly Automated Learning for Improved Active Safety of Vulnerable Road Users
Mar 09, 2018
Highly automated driving requires precise models of traffic participants. Many state of the art models are currently based on machine learning techniques. Among others, the required amount of labeled data is one major challenge. An autonomous learning process addressing this problem is proposed. The initial models are iteratively refined in three steps: (1) detection and context identification, (2) novelty detection and active learning and (3) online model adaption.
* 4 pages, 1 figure