 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Agent-Based Collaborative Learning in Cross-Individual Wearable Sensor-Based Human Activity Recognition
Nov 06, 2023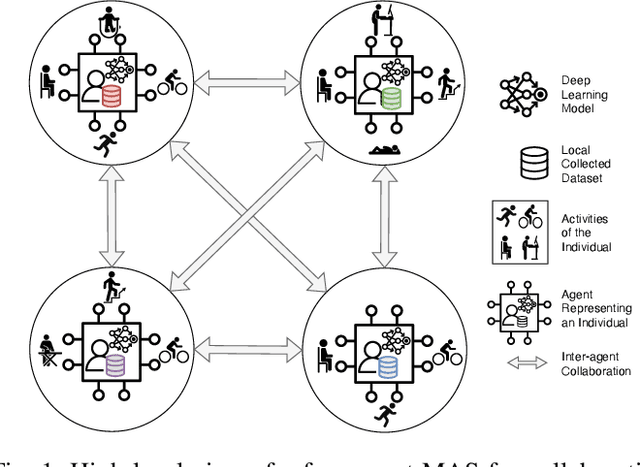

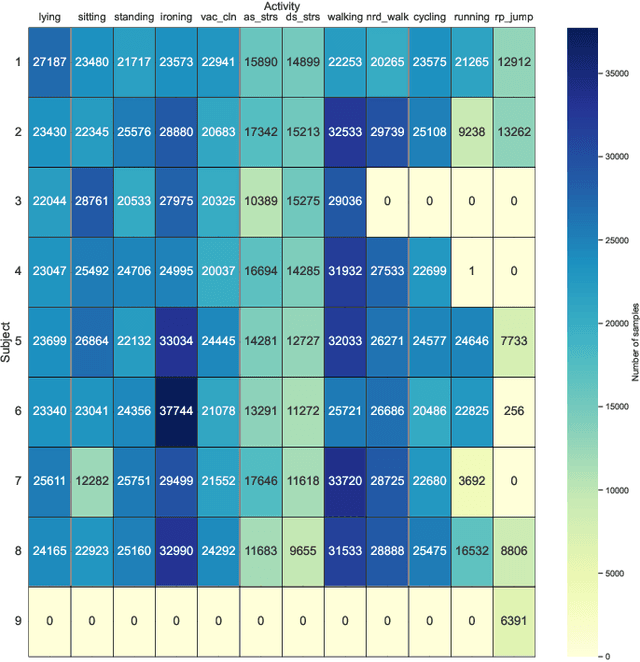

The rapid growth of wearable sensor technologies holds substantial promise for the field of personalized and context-aware Human Activity Recognition. Given the inherently decentralized nature of data sources within this domain, the utilization of multi-agent systems with their inherent decentralization capabilities presents an opportunity to facilitate the development of scalable, adaptable, and privacy-conscious methodologies. This paper introduces a collaborative distributed learning approach rooted in multi-agent principles, wherein individual users of sensor-equipped devices function as agents within a distributed network, collectively contributing to the comprehensive process of learning and classifying human activities. In this proposed methodology, not only is the privacy of activity monitoring data upheld for each individual, eliminating the need for an external server to oversee the learning process, but the system also exhibits the potential to surmount the limitations of conventional centralized models and adapt to the unique attributes of each user. The proposed approach has been empirically tested on two publicly accessible human activity recognition datasets, specifically PAMAP2 and HARTH, across varying settings. The provided empirical results conclusively highlight the efficacy of inter-individual collaborative learning when contrasted with centralized configurations, both in terms of local and global generalization.
Hybrid Algorithm Selection and Hyperparameter Tuning on Distributed Machine Learning Resources: A Hierarchical Agent-based Approach
Sep 14, 2023Algorithm selection and hyperparameter tuning are critical steps in both academic and applied machine learning. On the other hand, these steps are becoming ever increasingly delicate due to the extensive rise in the number, diversity, and distributedness of machine learning resources. Multi-agent systems, when applied to the design of machine learning platforms, bring about several distinctive characteristics such as scalability, flexibility, and robustness, just to name a few. This paper proposes a fully automatic and collaborative agent-based mechanism for selecting distributedly organized machine learning algorithms and simultaneously tuning their hyperparameters. Our method builds upon an existing agent-based hierarchical machine-learning platform and augments its query structure to support the aforementioned functionalities without being limited to specific learning, selection, and tuning mechanisms. We have conducted theoretical assessments, formal verification, and analytical study to demonstrate the correctness, resource utilization, and computational efficiency of our technique. According to the results, our solution is totally correct and exhibits linear time and space complexity in relation to the size of available resources. To provide concrete examples of how the proposed methodologies can effectively adapt and perform across a range of algorithmic options and datasets, we have also conducted a series of experiments using a system comprised of 24 algorithms and 9 datasets.
Agent-based Collaborative Random Search for Hyper-parameter Tuning and Global Function Optimization
Mar 03, 2023Hyper-parameter optimization is one of the most tedious yet crucial steps in training machine learning models. There are numerous methods for this vital model-building stage, ranging from domain-specific manual tuning guidelines suggested by the oracles to the utilization of general-purpose black-box optimization techniques. This paper proposes an agent-based collaborative technique for finding near-optimal values for any arbitrary set of hyper-parameters (or decision variables) in a machine learning model (or general function optimization problem). The developed method forms a hierarchical agent-based architecture for the distribution of the searching operations at different dimensions and employs a cooperative searching procedure based on an adaptive width-based random sampling technique to locate the optima. The behavior of the presented model, specifically against the changes in its design parameters, is investigated in both machine learning and global function optimization applications, and its performance is compared with that of two randomized tuning strategies that are commonly used in practice. According to the empirical results, the proposed model outperformed the compared methods in the experimented classification, regression, and multi-dimensional function optimization tasks, notably in a higher number of dimensions and in the presence of limited on-device computational resources.
HAMLET: A Hierarchical Agent-based Machine Learning Platform
Oct 10, 2020



Hierarchical Multi-Agent Systems provide a convenient and relevant way to analyze, model, and simulate complex systems in which a large number of entities are interacting at different levels of abstraction. In this paper, we introduce HAMLET (Hierarchical Agent-based Machine LEarning plaTform), a platform based on hierarchical multi-agent systems, to facilitate the research and democratization of machine learning entities distributed geographically or locally. This is carried out by firstly modeling the machine learning solutions as a hypergraph and then autonomously setting up a multi-level structure composed of heterogeneous agents based on their innate capabilities and learned skills. HAMLET aids the design and management of machine learning systems and provides analytical capabilities for the research communities to assess the existing and/or new algorithms/datasets through flexible and customizable queries. The proposed platform does not assume restrictions on the type of machine learning algorithms/datasets and is theoretically proven to be sound and complete with polynomial computational requirements. Additionally, it is examined empirically on 120 training and four generalized batch testing tasks performed on 24 machine learning algorithms and 9 standard datasets. The experimental results provided not only establish confidence in the platform's consistency and correctness but also demonstrates its testing and analytical capacity.
A Directional Antenna based Leader-Follower Relay System for End-to-End Robot Communications
Nov 07, 2017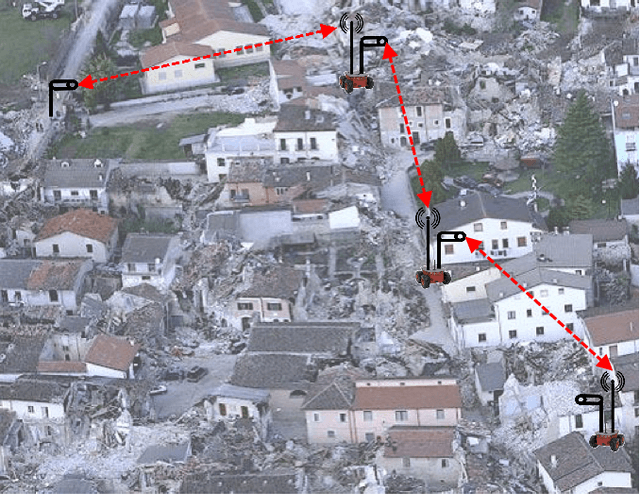


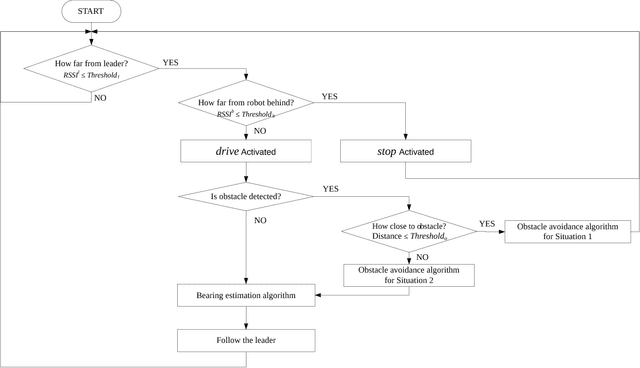
In this paper, we present a directional antenna-based leader-follower robotic relay system capable of building end-to-end communication in complicated and dynamically changing environments. The proposed system consists of multiple networked robots - one is a mobile end node and the others are leaders or followers acting as radio relays. Every follower uses directional antennas to relay a communication radio and to estimate the location of the leader robot as a sensory device. For bearing estimation, we employ a weight centroid algorithm (WCA) and present a theoretical analysis of the use of WCA for this work. Using a robotic convoy method, we develop online, distributed control strategies that satisfy the scalability requirements of robotic network systems and enable cooperating robots to work independently. The performance of the proposed system is evaluated by conducting extensive real-world experiments that successfully build actual communication between two end nodes.