 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA multiagent urban traffic simulation
Jan 26, 2012
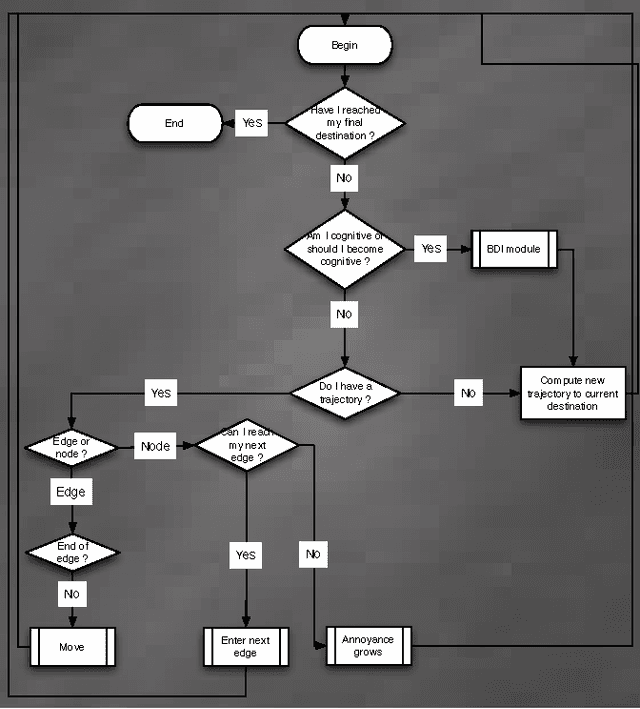
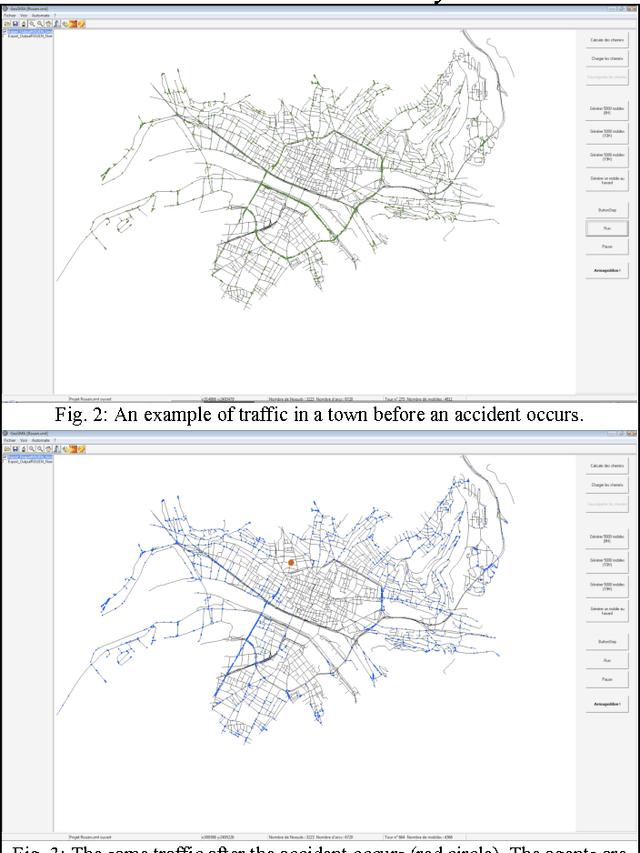
We built a multiagent simulation of urban traffic to model both ordinary traffic and emergency or crisis mode traffic. This simulation first builds a modeled road network based on detailed geographical information. On this network, the simulation creates two populations of agents: the Transporters and the Mobiles. Transporters embody the roads themselves; they are utilitarian and meant to handle the low level realism of the simulation. Mobile agents embody the vehicles that circulate on the network. They have one or several destinations they try to reach using initially their beliefs of the structure of the network (length of the edges, speed limits, number of lanes etc.). Nonetheless, when confronted to a dynamic, emergent prone environment (other vehicles, unexpectedly closed ways or lanes, traffic jams etc.), the rather reactive agent will activate more cognitive modules to adapt its beliefs, desires and intentions. It may change its destination(s), change the tactics used to reach the destination (favoring less used roads, following other agents, using general headings), etc. We describe our current validation of our model and the next planned improvements, both in validation and in functionalities.
* arXiv admin note: significant text overlap with arXiv:0909.1021 and arXiv:0910.1026
A multiagent urban traffic simulation. Part II: dealing with the extraordinary
Oct 06, 2009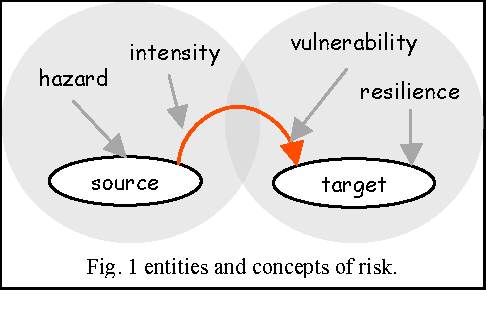
In Probabilistic Risk Management, risk is characterized by two quantities: the magnitude (or severity) of the adverse consequences that can potentially result from the given activity or action, and by the likelihood of occurrence of the given adverse consequences. But a risk seldom exists in isolation: chain of consequences must be examined, as the outcome of one risk can increase the likelihood of other risks. Systemic theory must complement classic PRM. Indeed these chains are composed of many different elements, all of which may have a critical importance at many different levels. Furthermore, when urban catastrophes are envisioned, space and time constraints are key determinants of the workings and dynamics of these chains of catastrophes: models must include a correct spatial topology of the studied risk. Finally, literature insists on the importance small events can have on the risk on a greater scale: urban risks management models belong to self-organized criticality theory. We chose multiagent systems to incorporate this property in our model: the behavior of an agent can transform the dynamics of important groups of them.
A multiagent urban traffic simulation Part I: dealing with the ordinary
Sep 05, 2009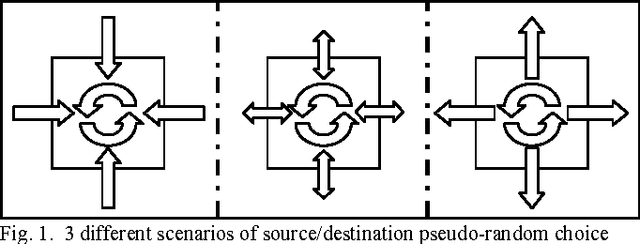
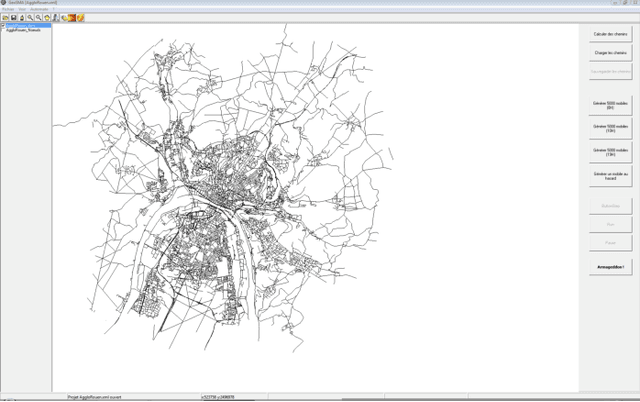
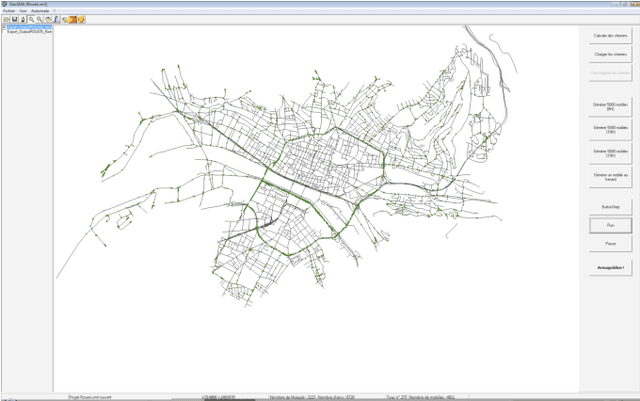
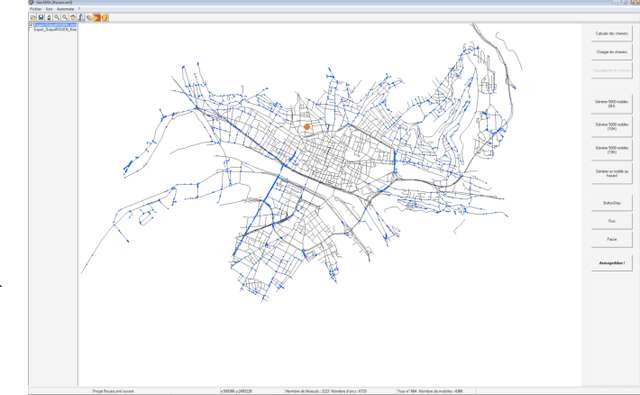
We describe in this article a multiagent urban traffic simulation, as we believe individual-based modeling is necessary to encompass the complex influence the actions of an individual vehicle can have on the overall flow of vehicles. We first describe how we build a graph description of the network from purely geometric data, ESRI shapefiles. We then explain how we include traffic related data to this graph. We go on after that with the model of the vehicle agents: origin and destination, driving behavior, multiple lanes, crossroads, and interactions with the other vehicles in day-to-day, ?ordinary? traffic. We conclude with the presentation of the resulting simulation of this model on the Rouen agglomeration.