 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA multiagent urban traffic simulation
Paper and Code
Jan 26, 2012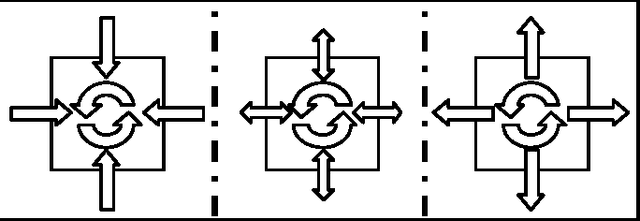
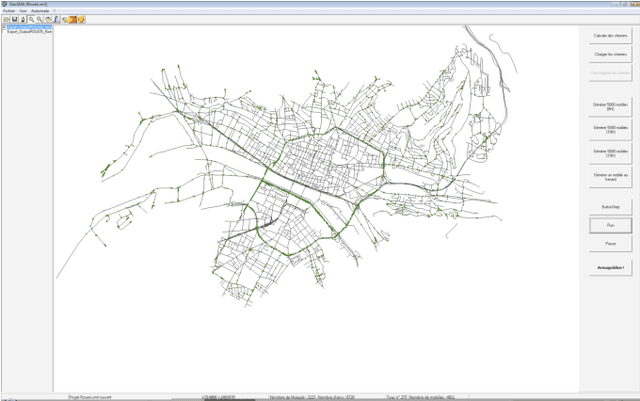
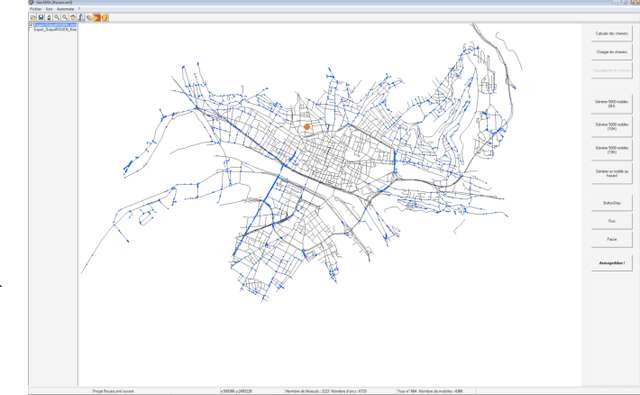
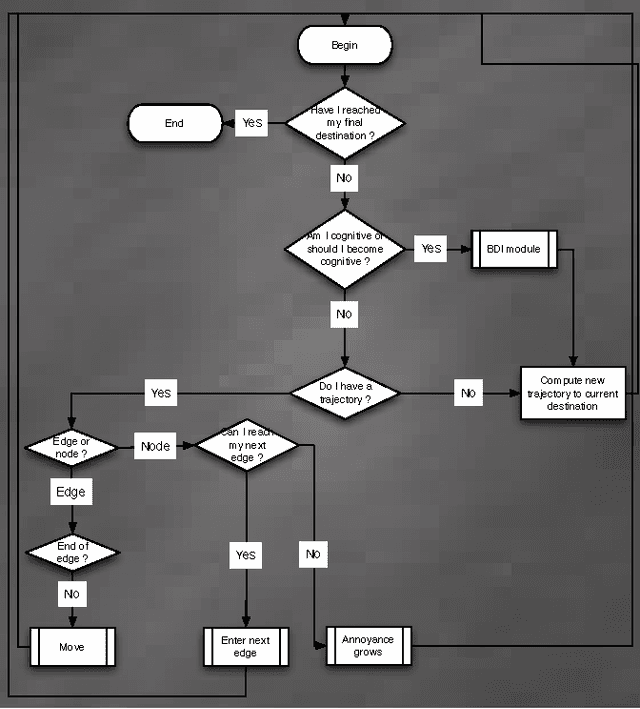
We built a multiagent simulation of urban traffic to model both ordinary traffic and emergency or crisis mode traffic. This simulation first builds a modeled road network based on detailed geographical information. On this network, the simulation creates two populations of agents: the Transporters and the Mobiles. Transporters embody the roads themselves; they are utilitarian and meant to handle the low level realism of the simulation. Mobile agents embody the vehicles that circulate on the network. They have one or several destinations they try to reach using initially their beliefs of the structure of the network (length of the edges, speed limits, number of lanes etc.). Nonetheless, when confronted to a dynamic, emergent prone environment (other vehicles, unexpectedly closed ways or lanes, traffic jams etc.), the rather reactive agent will activate more cognitive modules to adapt its beliefs, desires and intentions. It may change its destination(s), change the tactics used to reach the destination (favoring less used roads, following other agents, using general headings), etc. We describe our current validation of our model and the next planned improvements, both in validation and in functionalities.